









3D printers are great at creating small objects – and some can even be pressed into doing larger things, such as cars – but a 3D printer able to print a full-sized house would have to be, well, bigger than a house. To tackle this problem, a team of researchers from the Institute for Advanced Architecture of Catalonia (IAAC) in Barcelona removed the size restrictions of a printer altogether by using mobile 3D printer robots to print directly on site.
Though other structures have been printed in 3D – such as low-cost housing in China – these are produced piecemeal off site and have to be transported. This is where the IAAC concept is unique; it 3D prints structures in one continuous process, so that a building can be formed layer by layer in place.
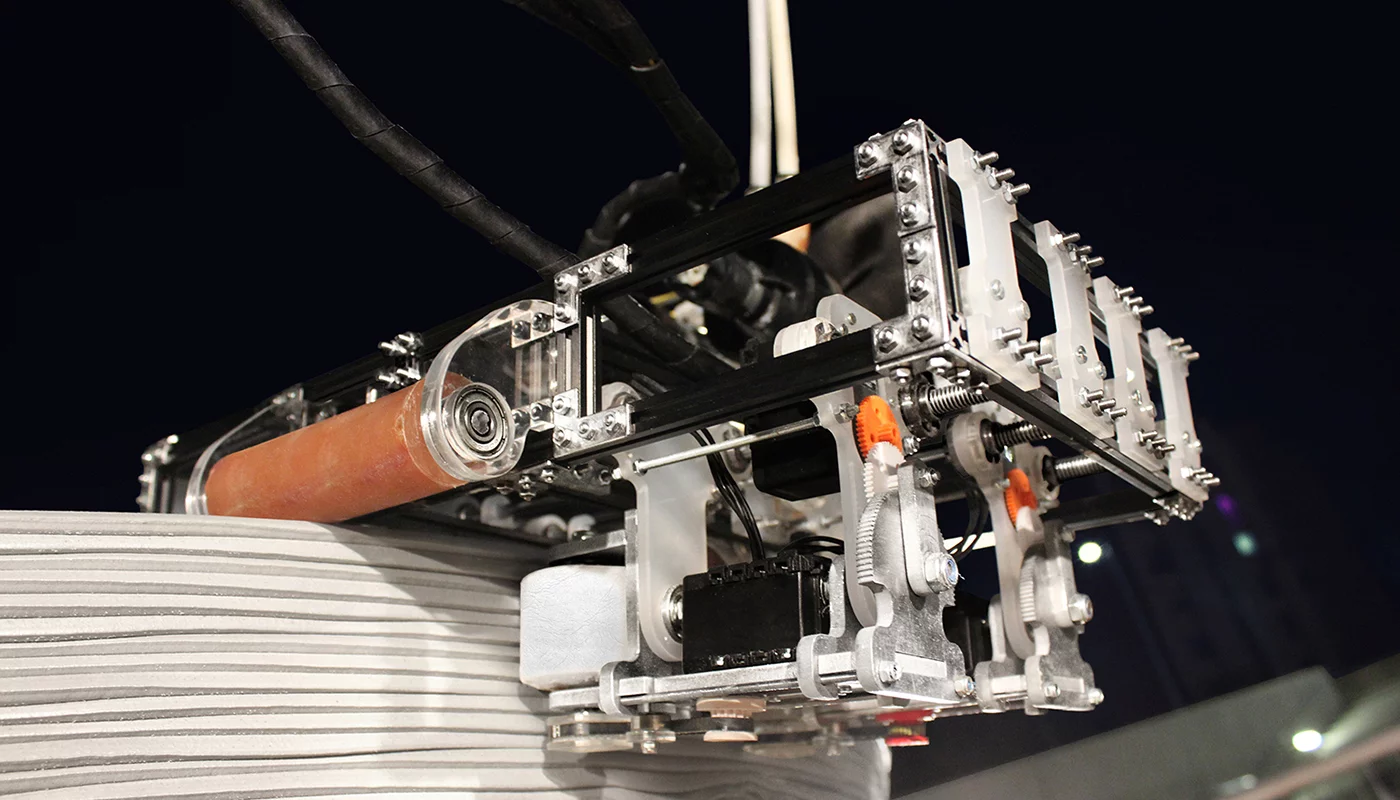
The robots used have been dubbed "Minibuilders" because of their diminutive stature, the largest being just 16.5 in (42 cm) wide. These robots make up a team of three that all carry out different functions in the process, working independently on their own task but in coordination with each other on the overall work. Each Minibuilder performs its role in order using instructions provided by a central computer, in conjunction with its own sensors and local positioning systems. One other robot – a "Supplier" robot – provides the liquid building material to each of the Minibuilders, as required.

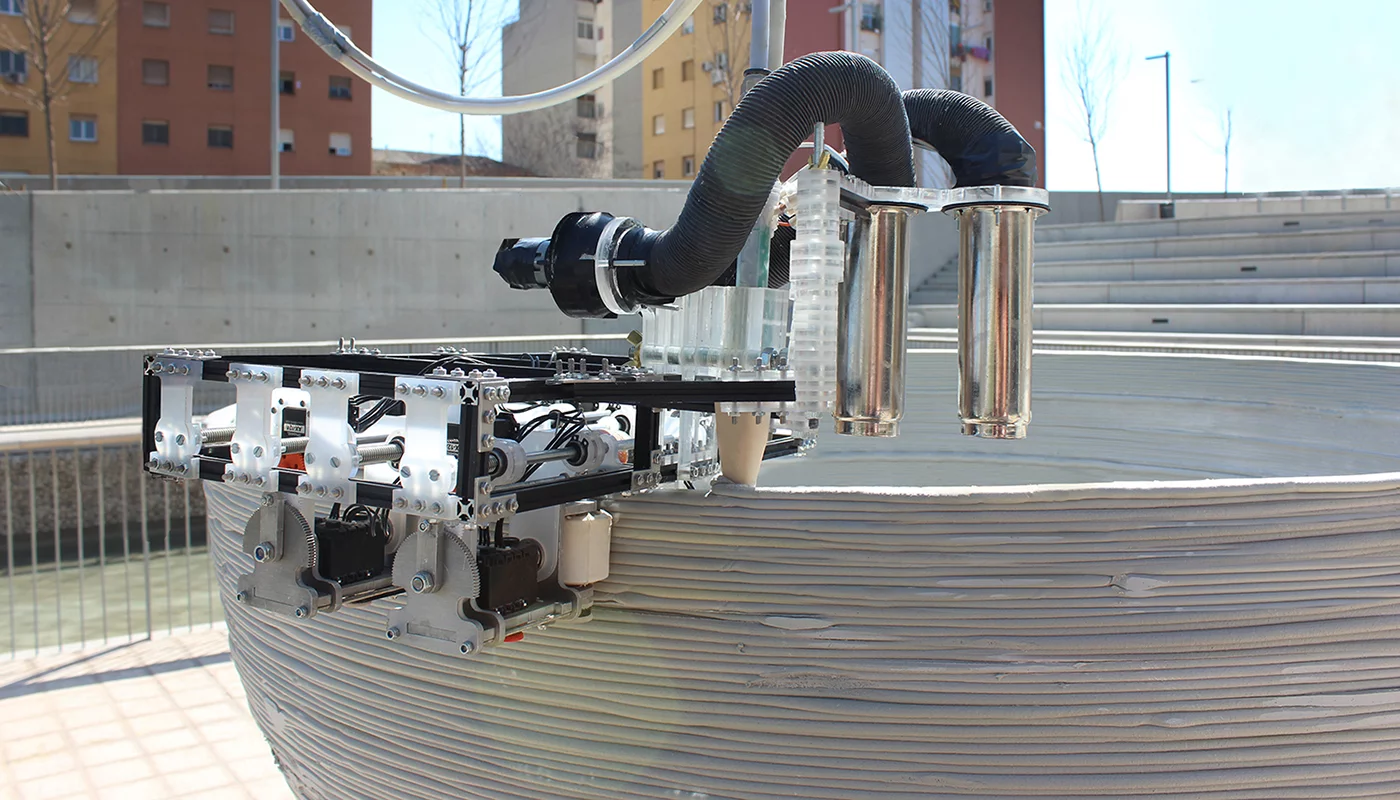
To create a structure, a "Foundation" robot begins by laying down the base – in the case of the exhibition structure, artificial marble – by extruding material in a precise pattern from its print head that rises as each successive layer is applied. This continues until the limit of the robots height is reached, and the next robot moves in.
The "Grip" robot follows on from the Foundation robot by attaching itself to the foundation layers using its four rollers. It then moves its way around the structure laying down further material to create the walls and using heaters to dry it. Once it has completed the walls, the Grip robot then moves on to making the ceilings and window and door lintels.
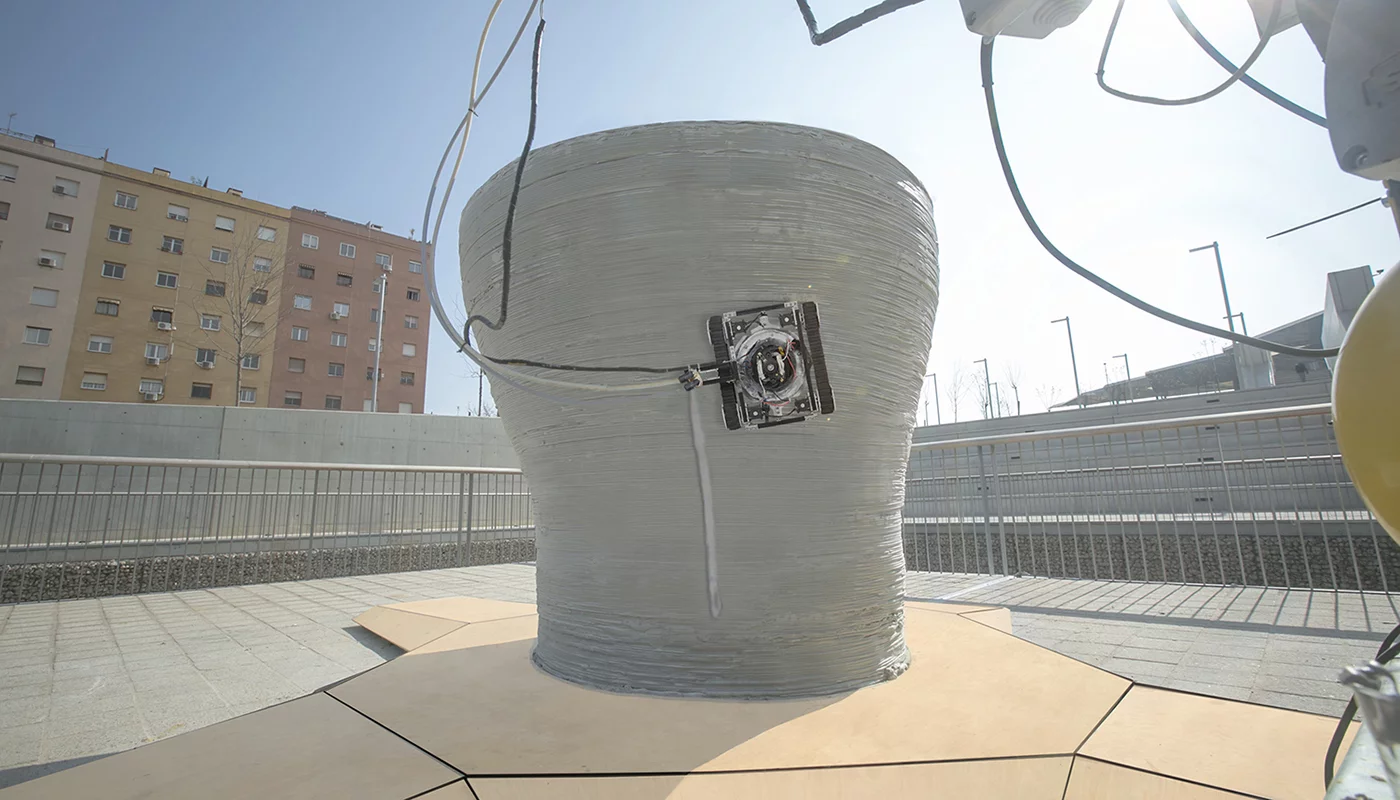
The last robot in the Minibuilder construction process is the "Vacuum" robot. It attaches itself to the surface of the structure under construction with a vacuum-operated suction cup. This robot moves up and down the construction repeatedly printing material at an almost perpendicular angle to the other layers, thereby providing strength reinforcement to the structure.
Though the first construction completed by the Minibuilders is a demonstration piece created in the exterior exhibition space of the Design Museum of Barcelona, it is envisaged that the team's work will one day lead to swarms of 3D printing robots constructing full-size structures.
The video below shows the Minibuilders in action.
Source: IAAC
