
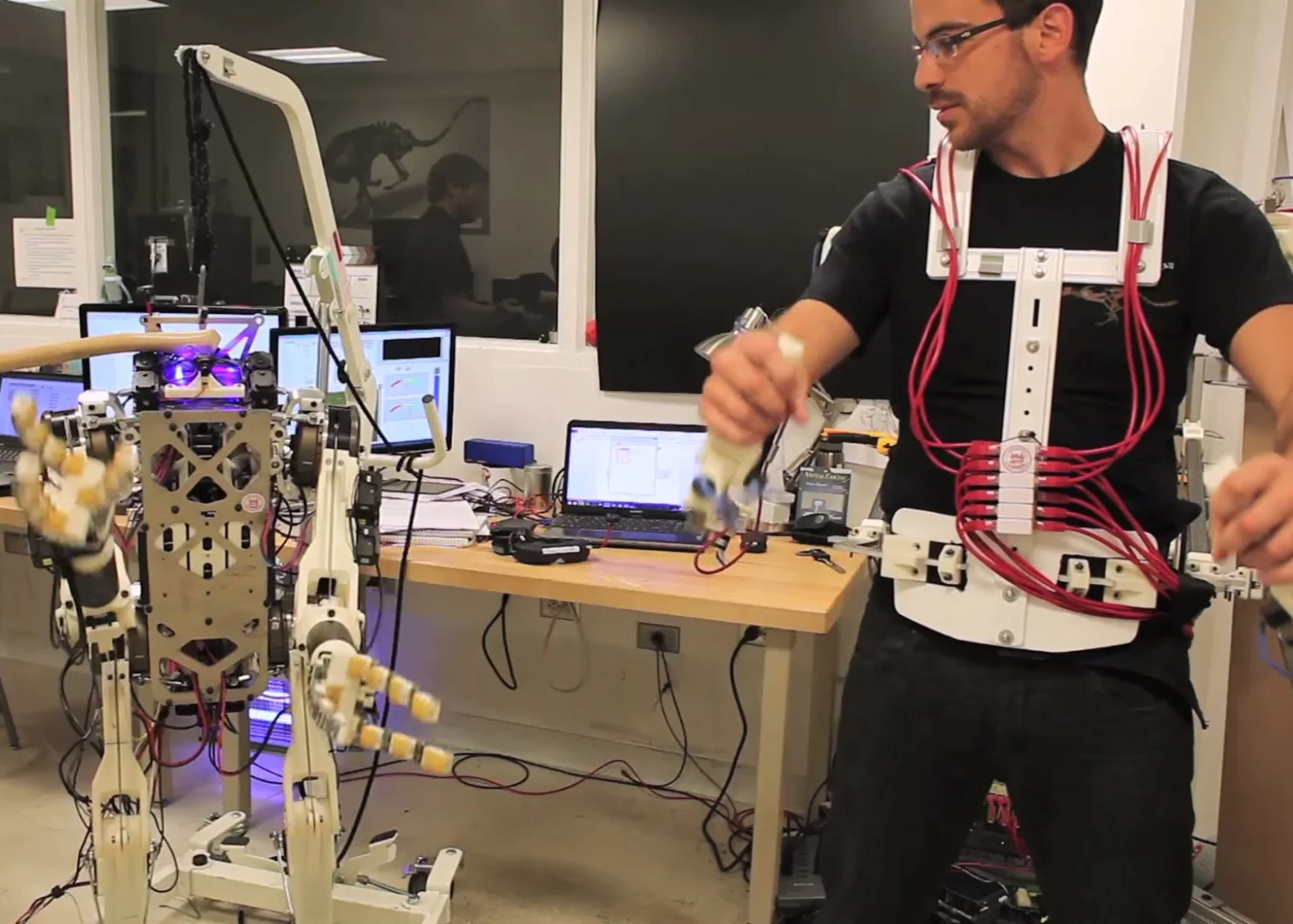
Robotics research is moving along at such a fast pace that it can be difficult to spot the major milestones of innovation in the technology as they go by. One significant step forward is in evidence at MIT in the form of Hermes. Physically it's all robot, but its actions and reflexes are controlled by a human being.
The robot feeds back information about its balance and positioning in real-time, so the human operator is able to adjust his or her feet and body accordingly. It addresses one of the major problems for humanoid robots – keeping upright on two feet. In other words, the reflexes of the robot to changing terrain or from a shove in the back can be almost as good as those of a human.
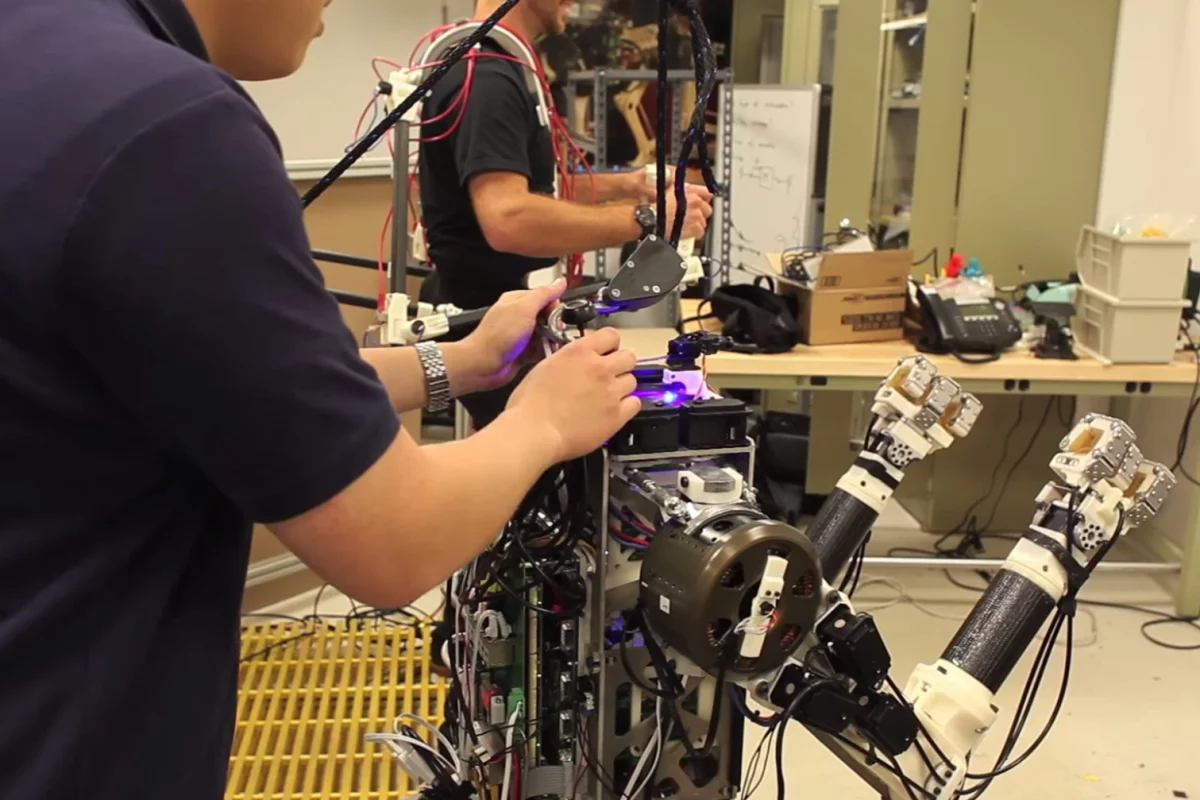
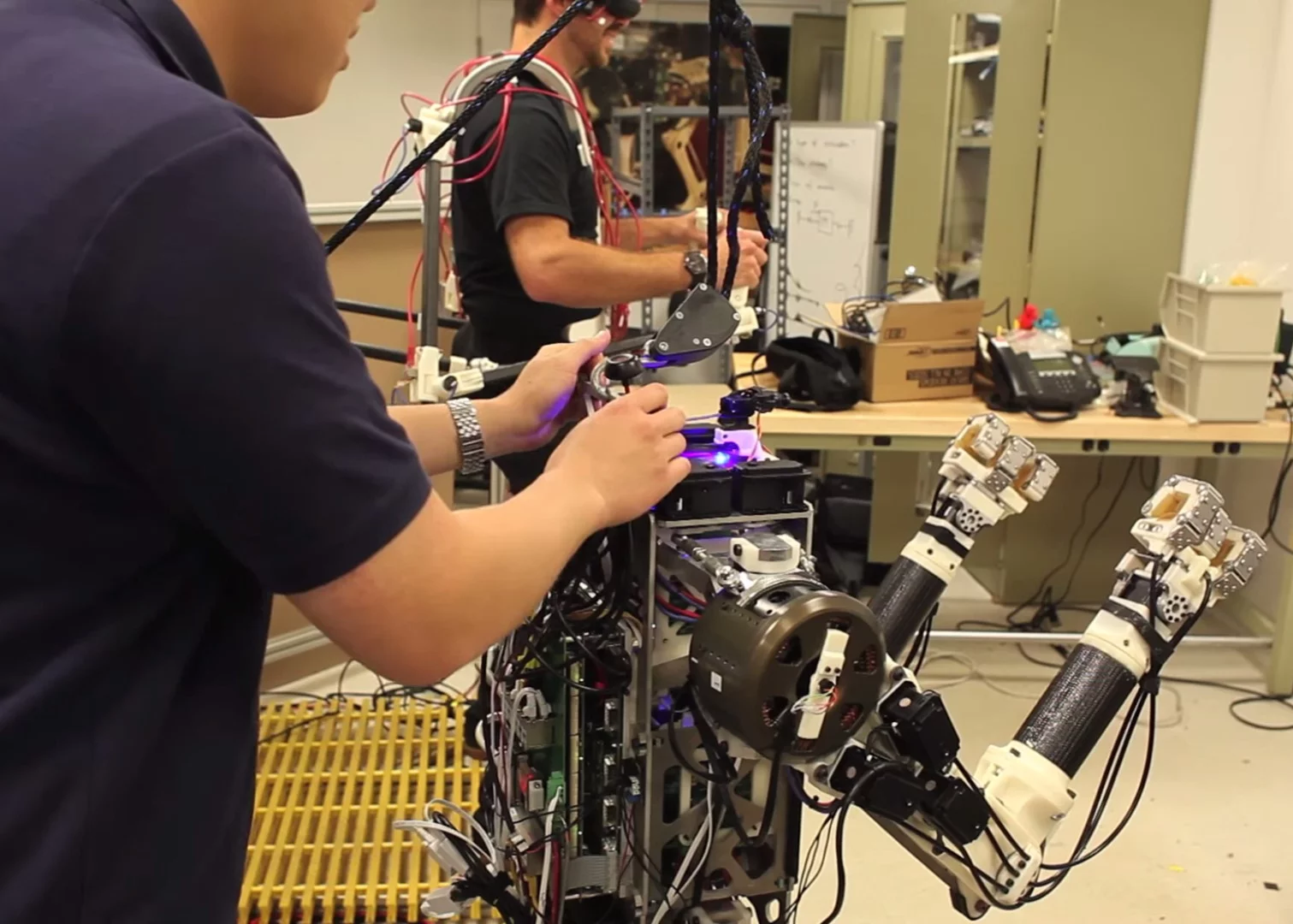
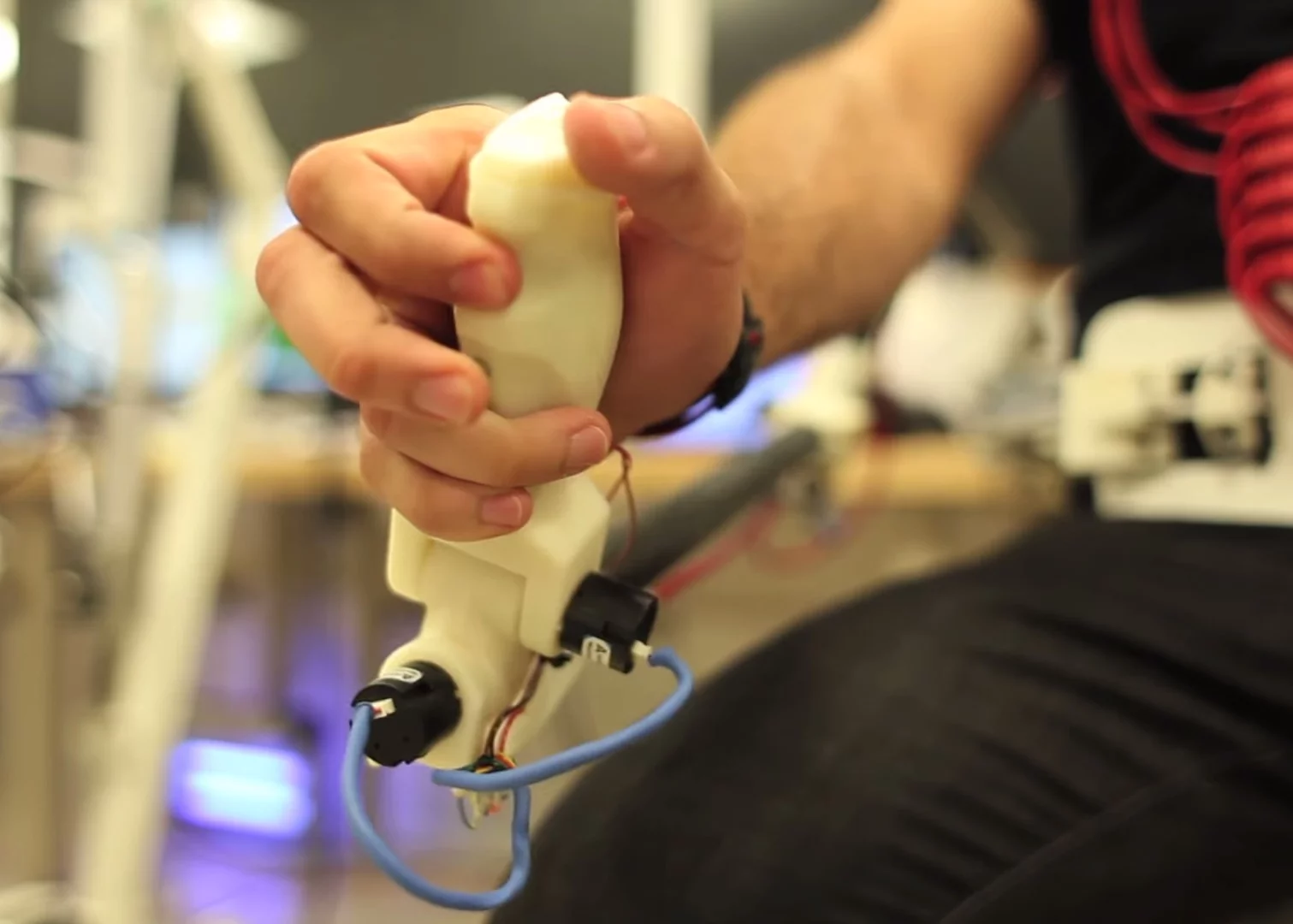
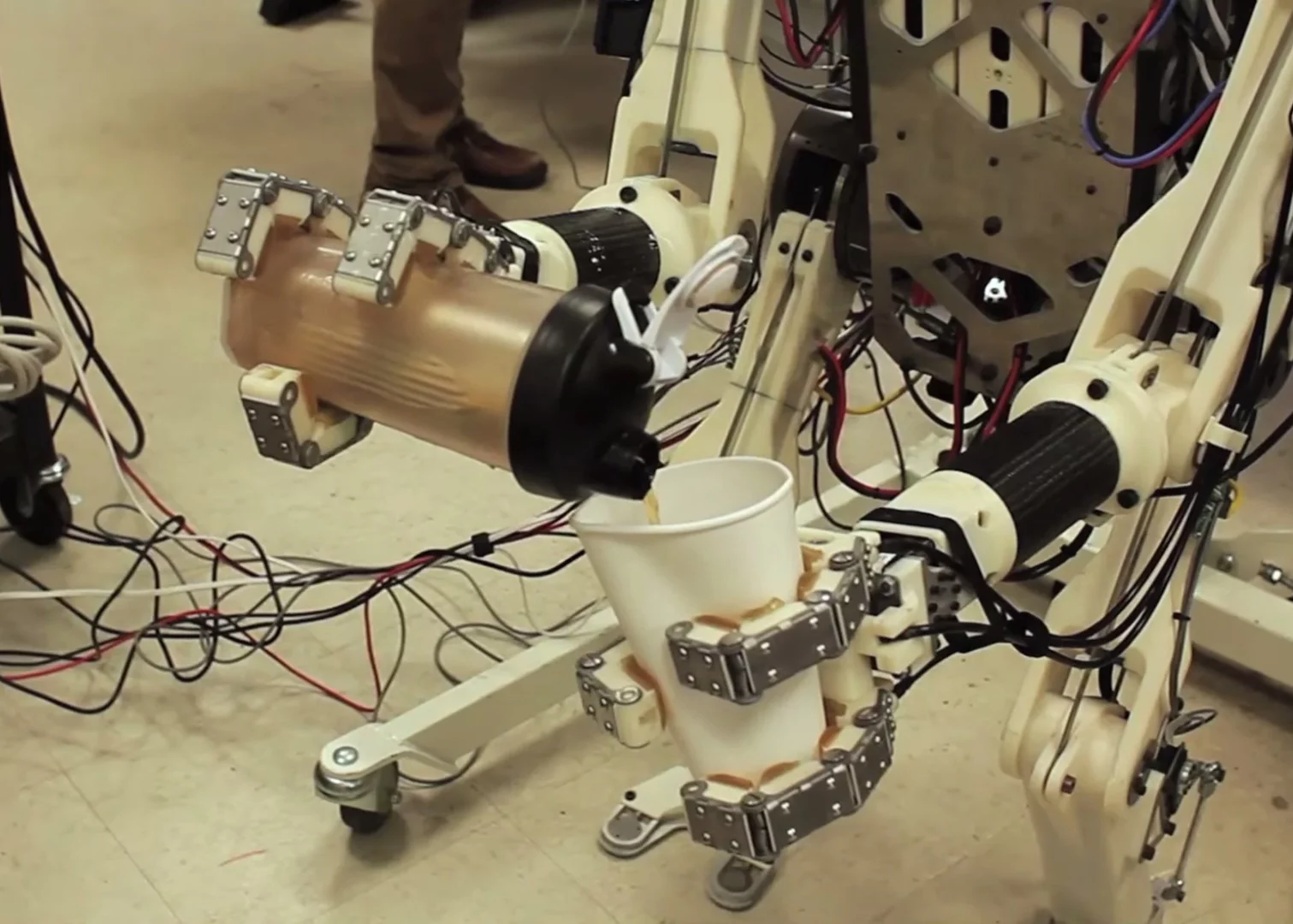
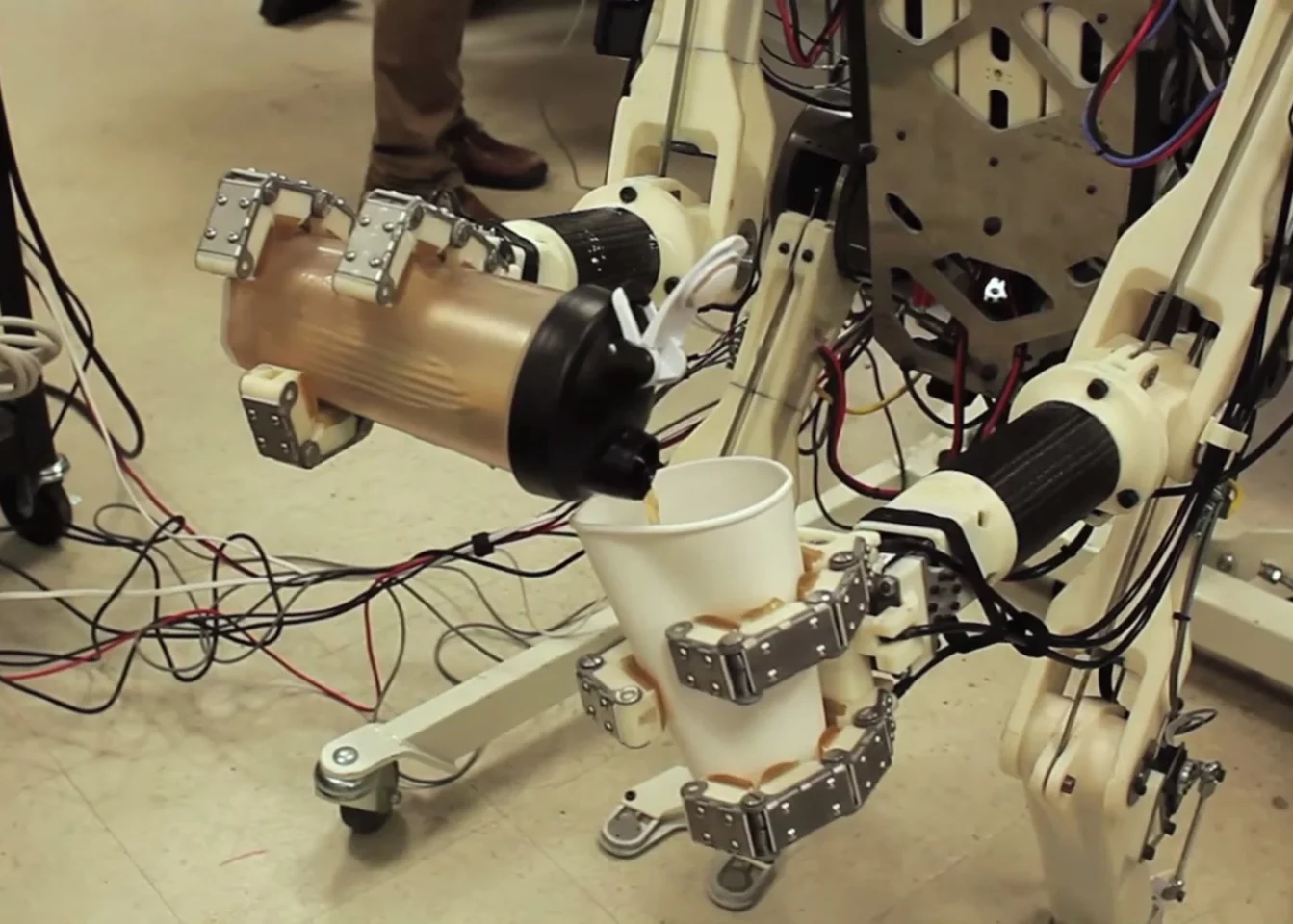
Also of note are the hands of Hermes, three-fingered claws that can pick up power tools, crush a soda can or even pour out a coffee. Using joysticks rigged up to the main exoskeleton, the human operator is able to pick up objects and interact with the surroundings with more precision than a robot of this type would usually have.
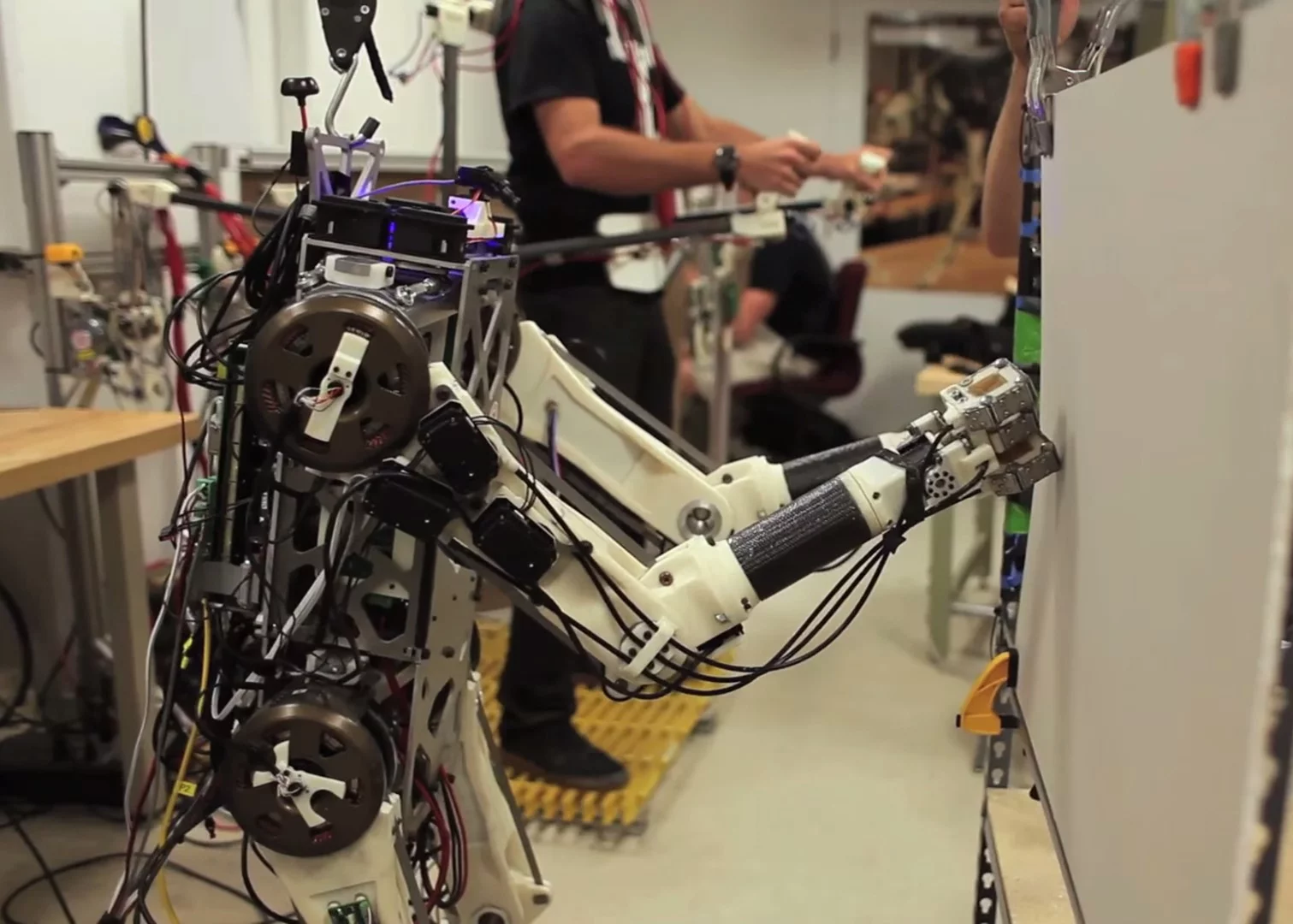
There are plenty of advantages to having a human operator control a robot in the field, because the machine benefits from thousands of years of brain evolution and the human being benefits from being able to stay out of harm's way (in the event of a natural disaster or in the case of a walk across an uninhabitable planet). The robot is able to directly benefit from some of the things humans can still do better, from keeping their balance to tightening a grip on an object.
The final piece of the jigsaw is a pair of vision goggles that enable the human controller to see whatever is ahead of Hermes. Whether trying to navigate through a series of rooms or attempting to pick up an object from the floor, it gives the operator a greater sense of awareness of the robot's surroundings.
PhD students Joao Ramos and Albert Wang of the MIT Department of Mechanical Engineering are behind the project, and they eventually envisage more robotic intelligence being added to the design.
"The human's still going to provide that creativity, that problem-solving and that large-scale coordination of all the joints, but we've designed the robot to be stronger than a person, so we'd imagine that in the future we want to merge some level of autonomous control along with the human's intelligence," explains Wang.
View the full story from MIT News in the video below.
Source: MIT via Popular Science





