In anticipation of more ambitious planetary missions, NASA's Jet Propulsion Laboratory (JPL) in Pasadena, California, in collaboration with Masten Space Systems in Mojave, California, has recently been testing new landing technologies using an Autonomous Descent and Ascent Powered-flight Testbed (ADAPT). Aimed at developing new systems for landing on Mars and other planets with much greater precision, a new imaging landing system and algorithm were tested using the demonstration vehicle on two successful flights.
Making a precision landing on Earth from space is a remarkable achievement, but for a robotic probe landing on another planet without the benefit of ground control, GPS, or navigation beacons, that's another matter entirely. Relying on pre-programmed instructions and onboard instruments, landers like Curiosity must settle for aiming at ellipses covering hundreds of square miles. Also, because landers don't include imaging systems for controlling navigation, they are literally flying blind.
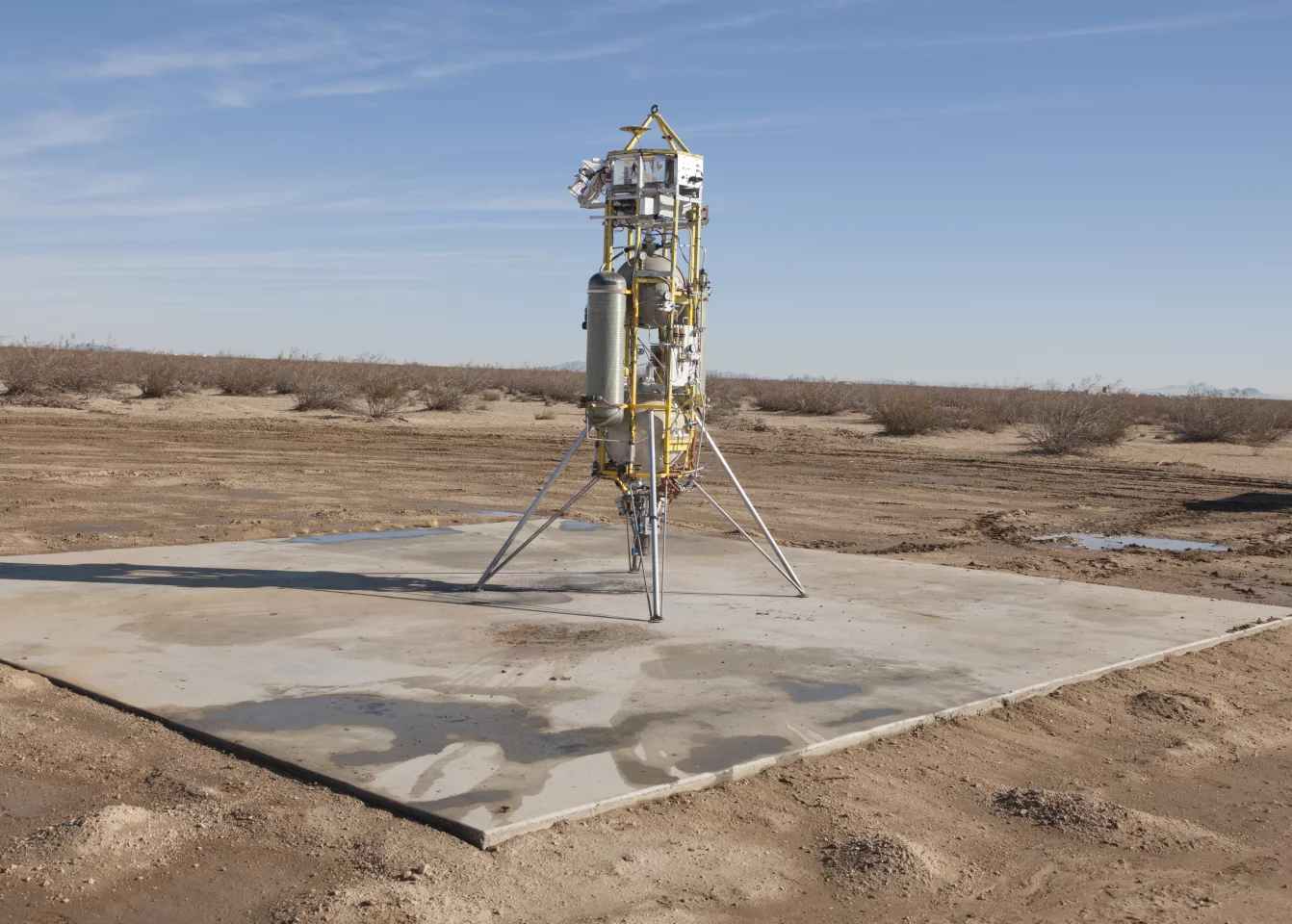
According to JPL, the ADAPT platform is based on Masten's XA-0.1B "Xombie" vertical-launch, vertical-landing reusable rocket, which approximates the high-speed low-altitude descent rates of a Mars landing. For the recent tests, the ADAPT was equipped with a pair of new technologies designed to autonomously zero in on its destination in real time and guide it to the landing site.
The Lander Vision System (LVS) uses terrain relative navigation to determine its location. It does this by capturing a series of images, which it compares to those in its memory to guide it to the landing point. The Guidance for Fuel-Optimal Large Diverts (G-FOLD) algorithm, which was developed by JPL and the University of Texas at Austin, uses onboard sensor information to calculate in real time the best path to the landing site and pilots the craft along it. In addition, JPL says that G-FOLD selects its trajectory for maximum performance from the propellant.
NASA carried out two test flights of the ADAPT on December 4 and 9, 2014 at the space agency's Armstrong Flight Research Center at Edwards Air Force Base, California. During this, the platform reached an altitude of 1,066 ft (325 m) before descending using LVS and G-FOLD. This allowed the rocket to make a precision landing on a pad 984 ft (300 m) east of the launch site.
"This represents a huge step forward in our future capabilities for safe and precise Mars landing, and demonstrates a highly effective approach for rapid, low-cost validation of new technologies for the entry, descent and landing of spacecraft," says Chad Edwards, chief technologist of the Mars Exploration Directorate at JPL. "This same technology has valuable applications to landing on the moon, asteroids and other space targets of interest."
The video below shows the ADAPT system in action.
Source: NASA