

























NASA and the Canadian Space Agency (CSA) have begun practicing satellite refueling in space on a test bed outside the International Space Station (ISS). In a series of tests that started on January 14 and are scheduled to continue until the 25th, the two space agencies are using the Robotic Refueling Module (RRM) and Canada’s Special Purpose Dexterous Manipulator, or Dextre, robot to carry out simulated refueling operations. The purpose of these tests is to develop refueling methods aimed at extending the life of satellites and reducing the amount of space debris orbiting the Earth.
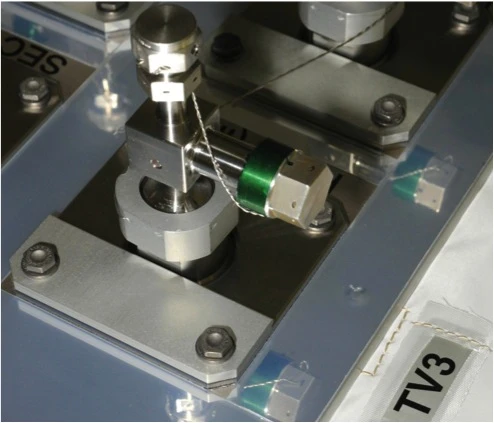
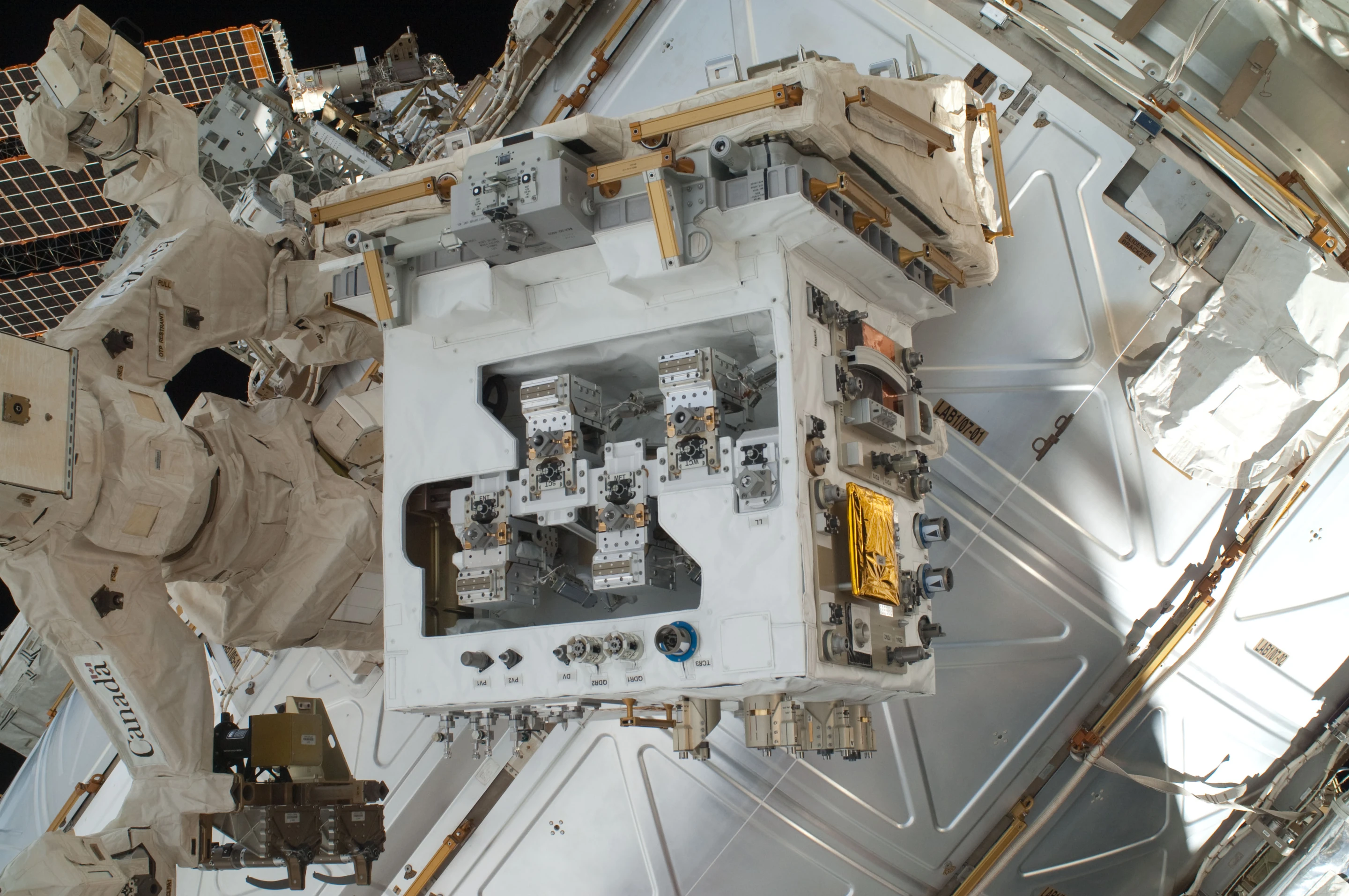
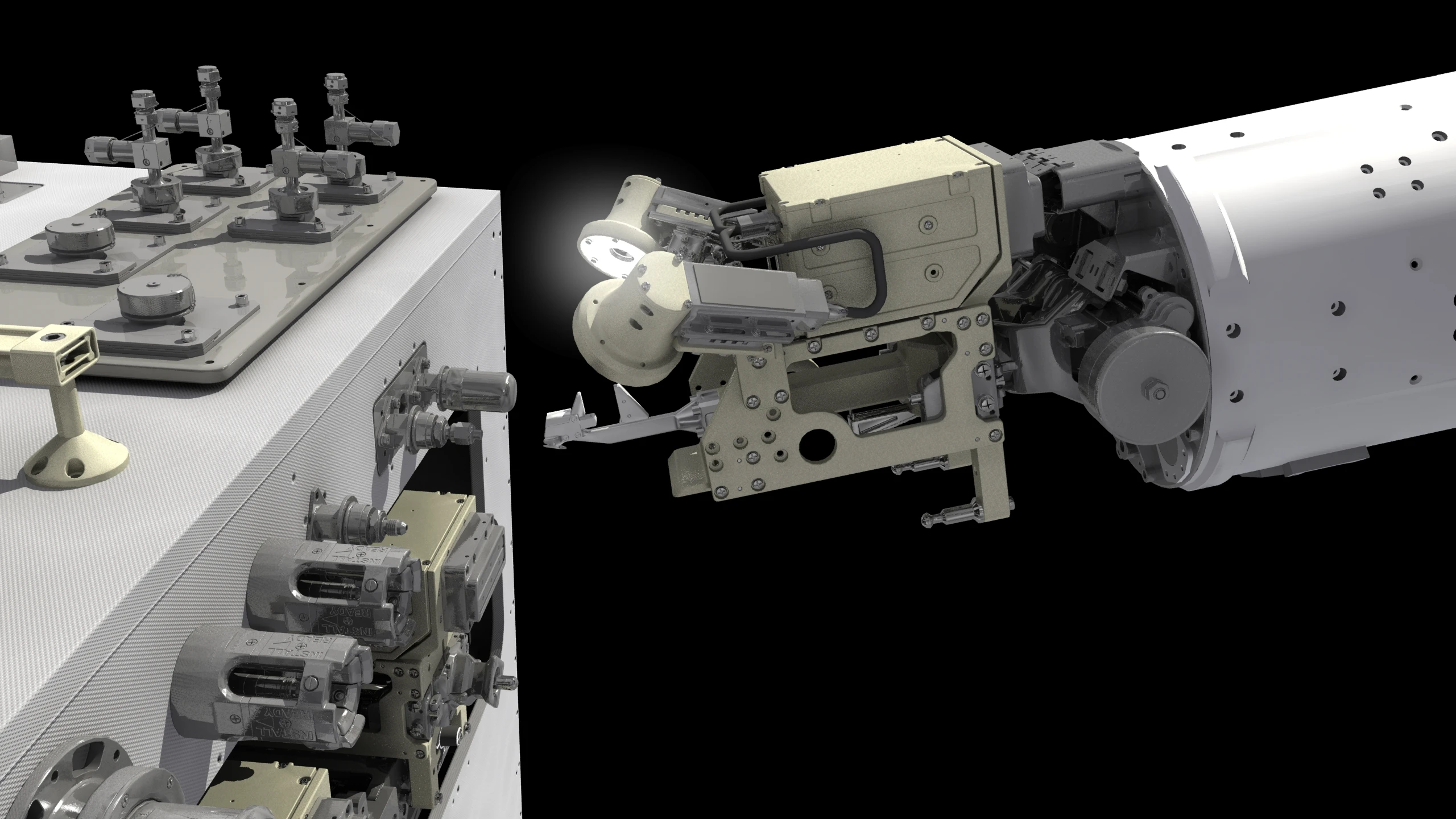
Refueling satellites in orbit is more than a matter of sticking a nozzle in a tank. It requires snipping securing wires, removing and replacing caps, opening and shutting valves, and replacing tools along the way. For this reason, NASA is using a special test bed and robot to carry out simulations under the supervision of the ISS crew.
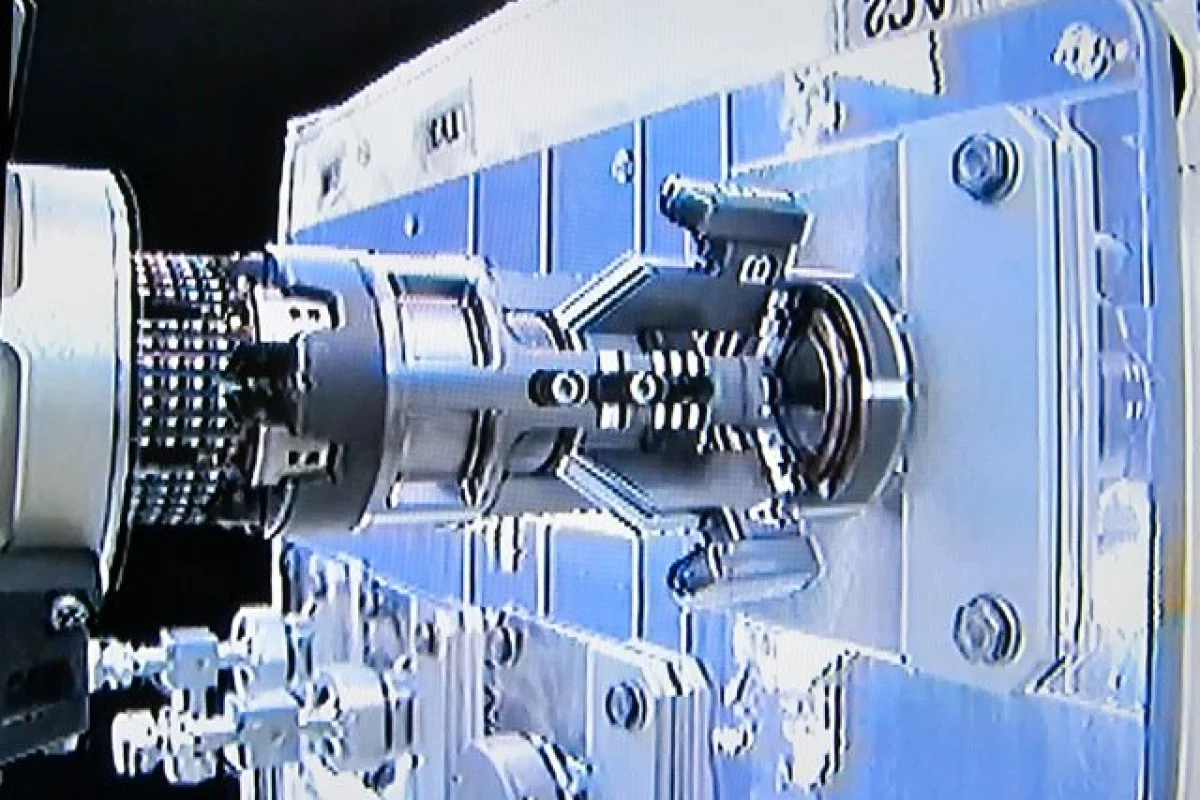
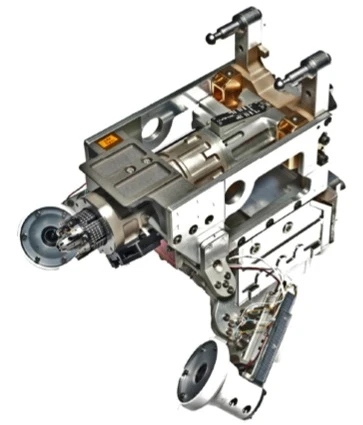
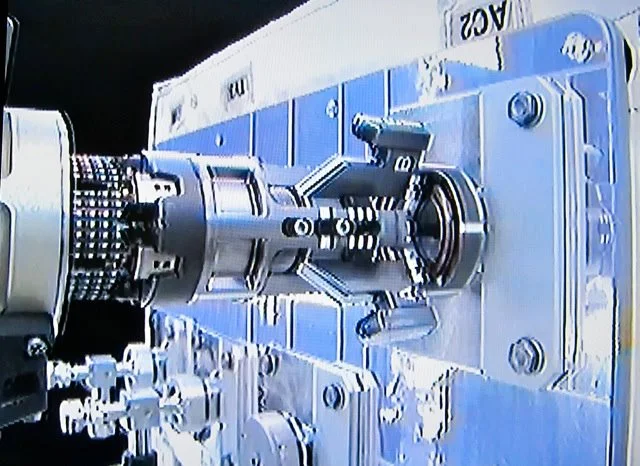
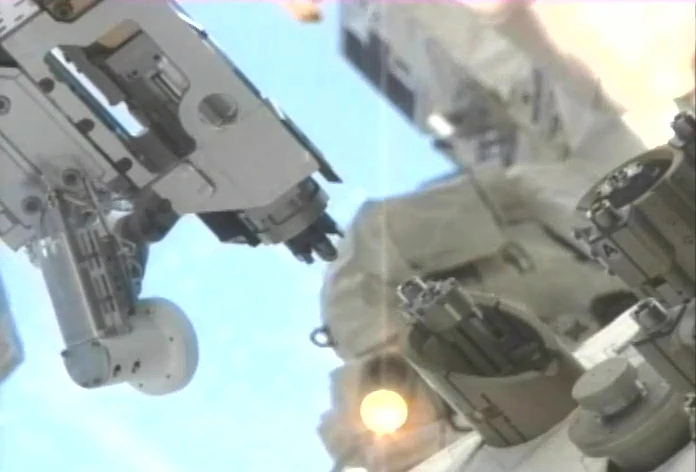
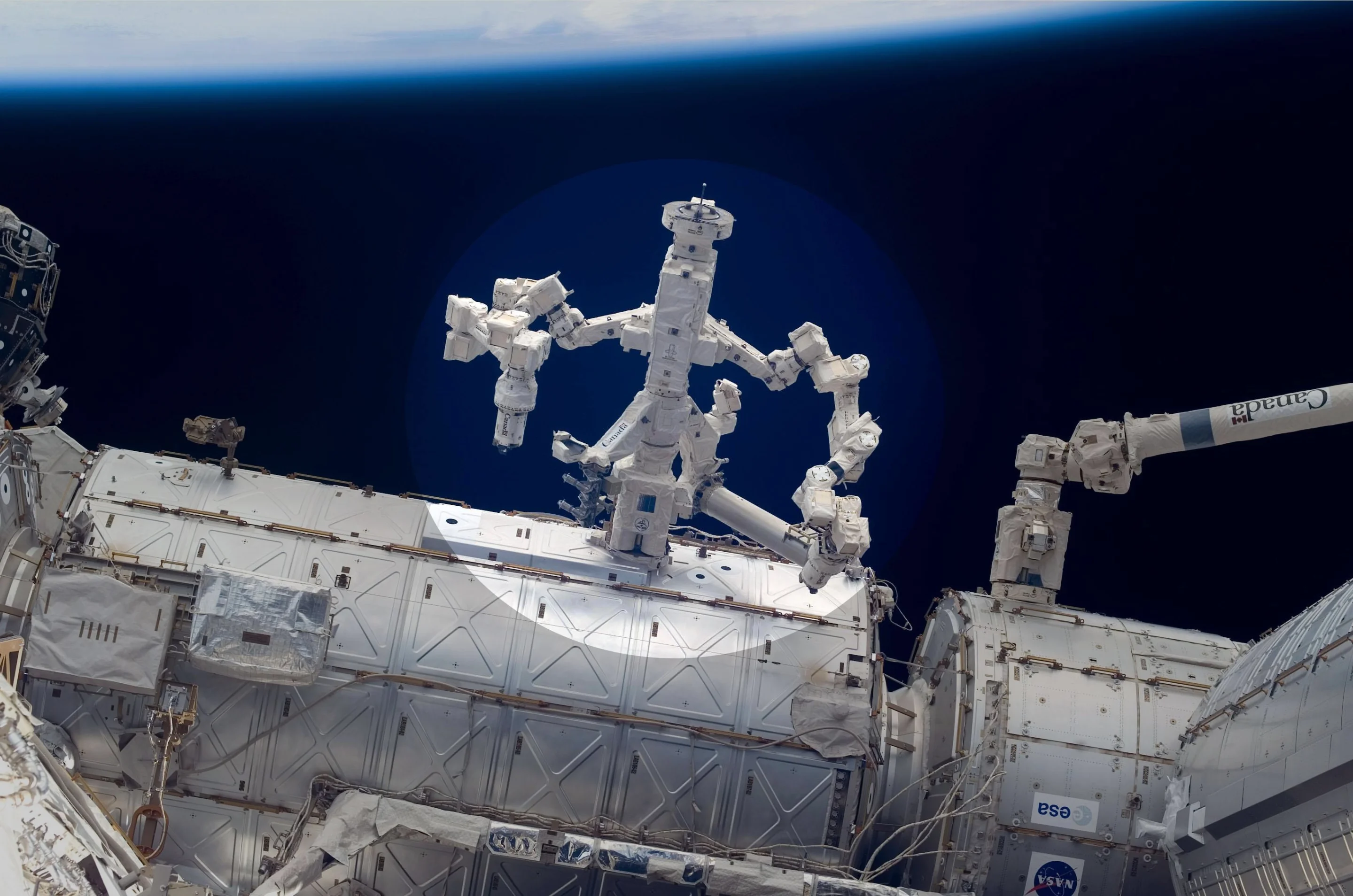
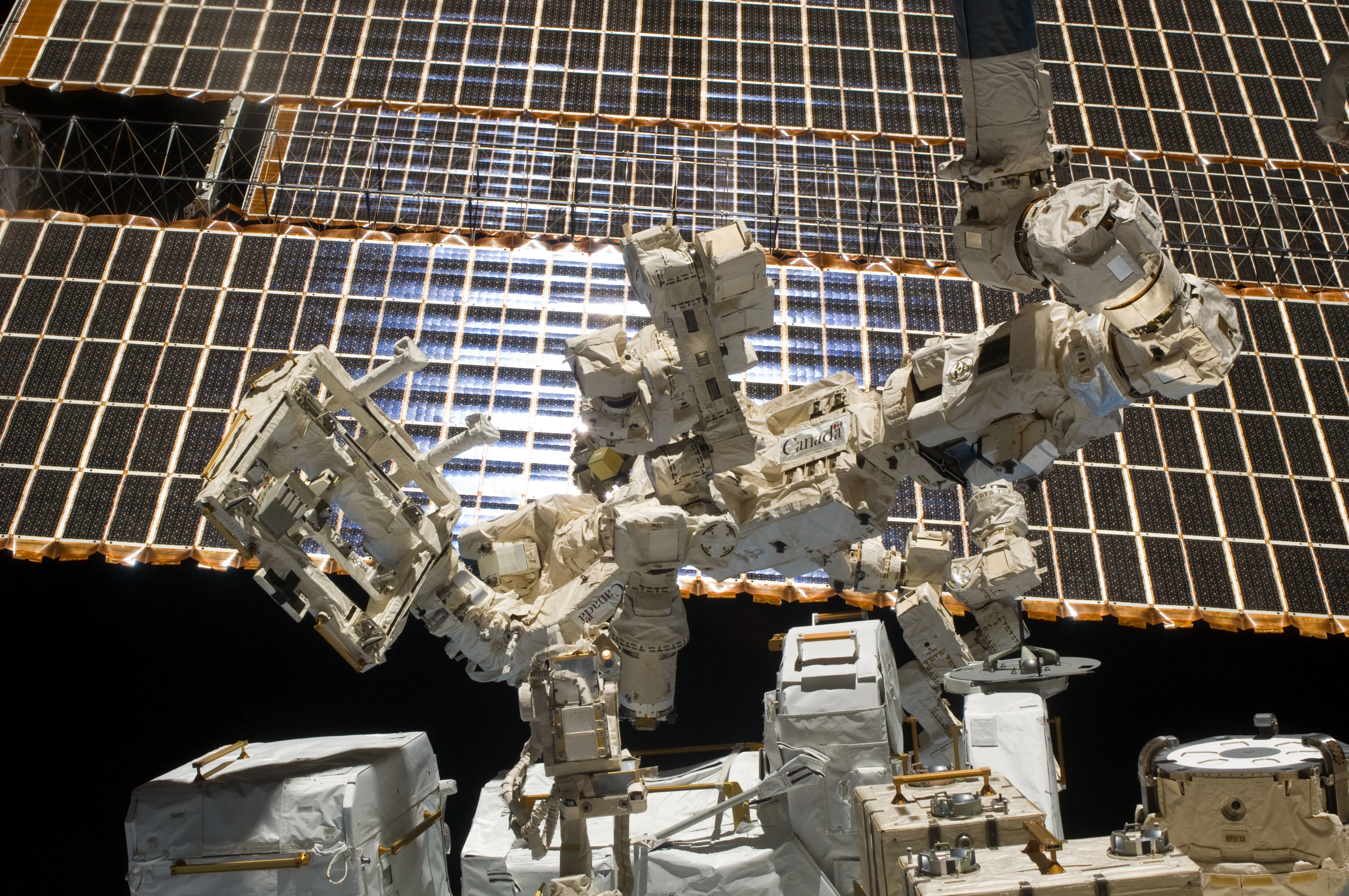
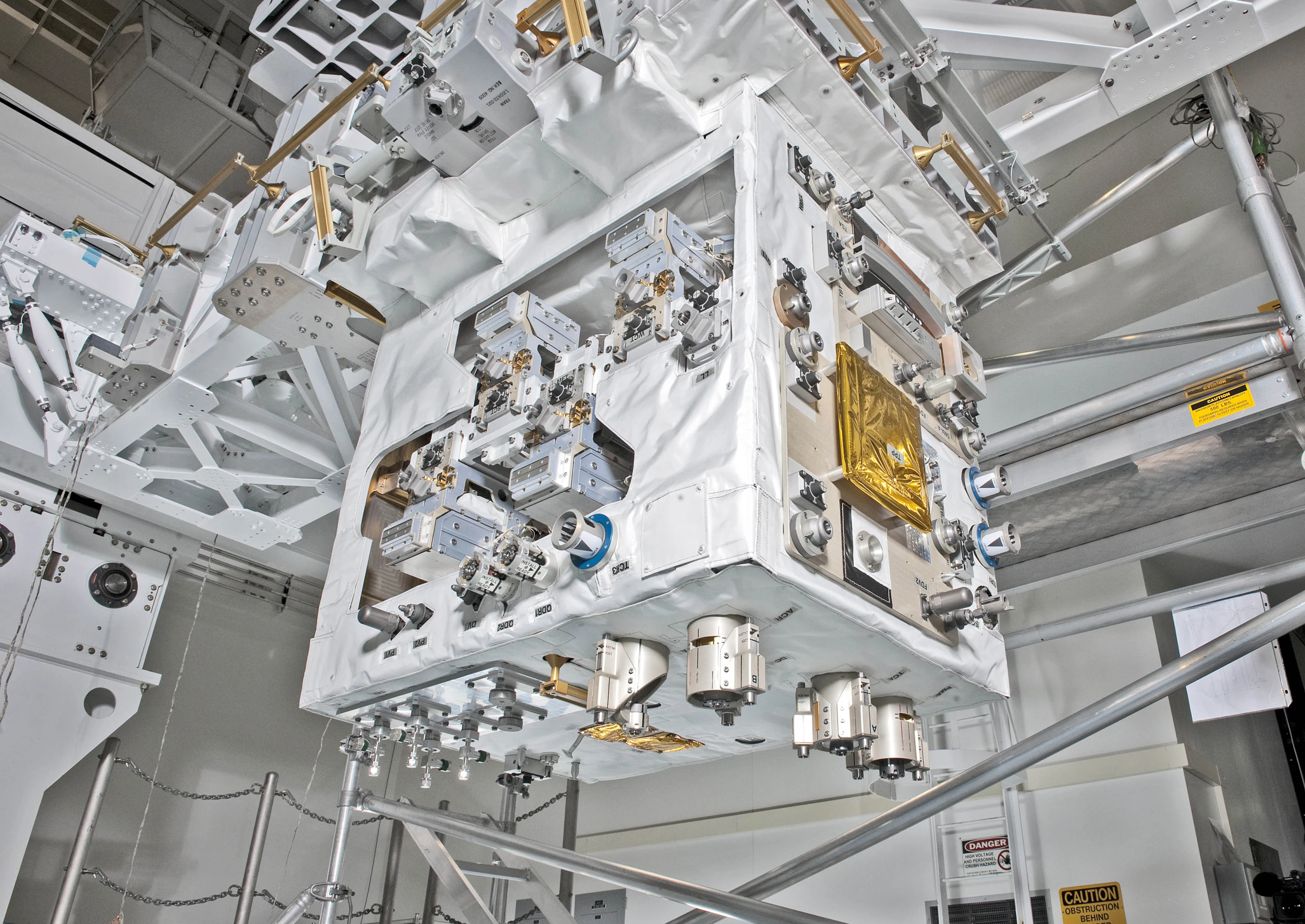
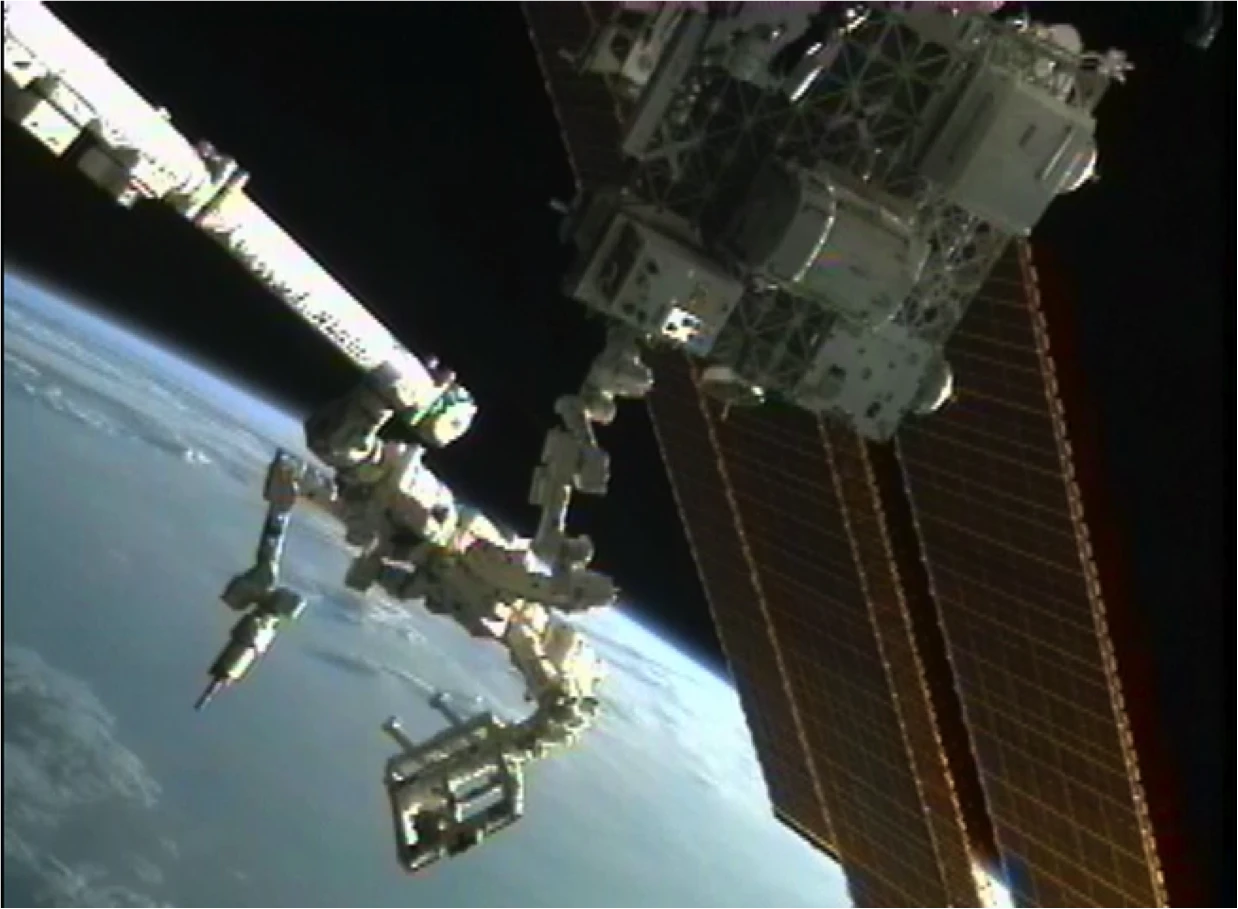
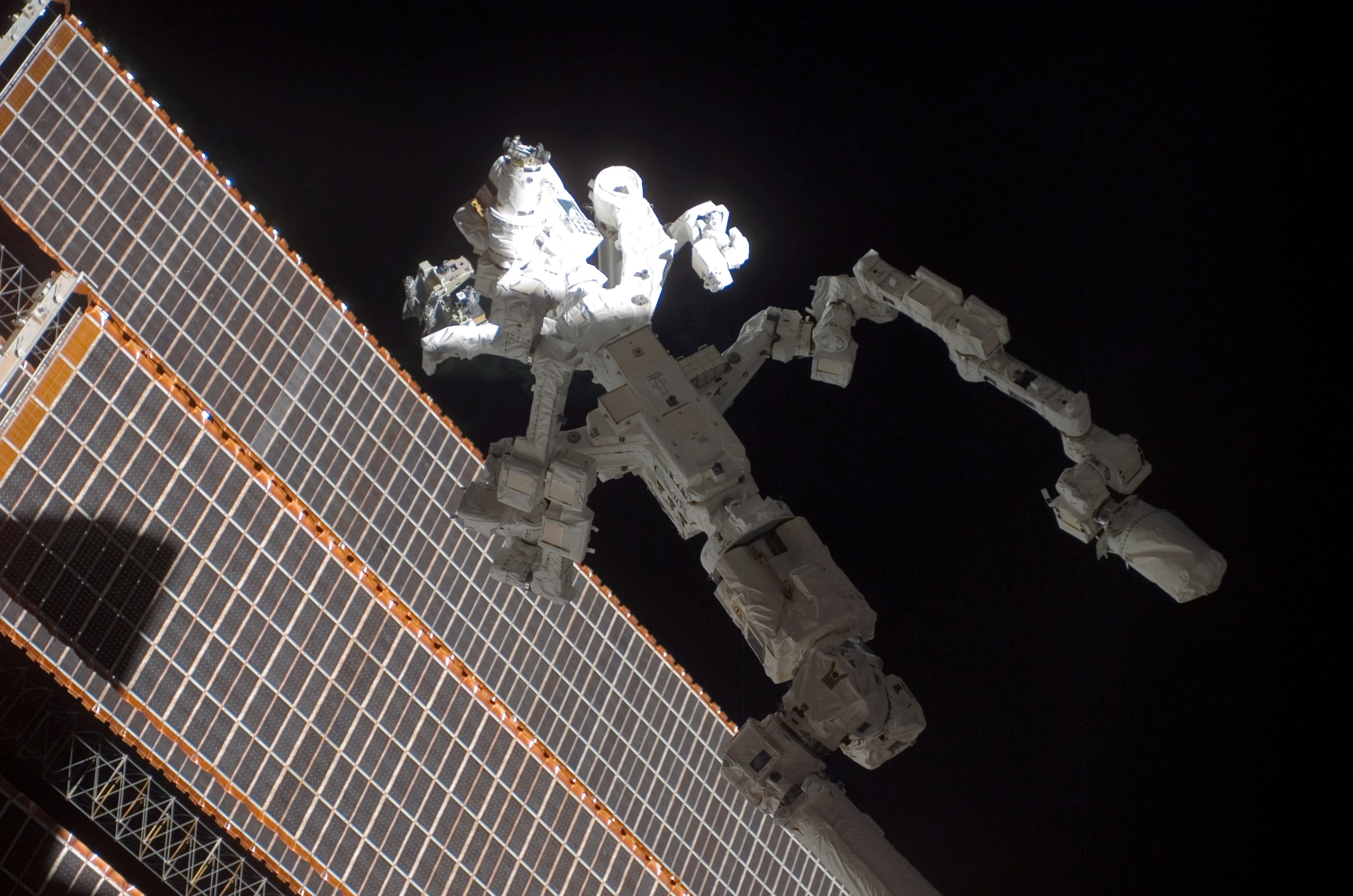
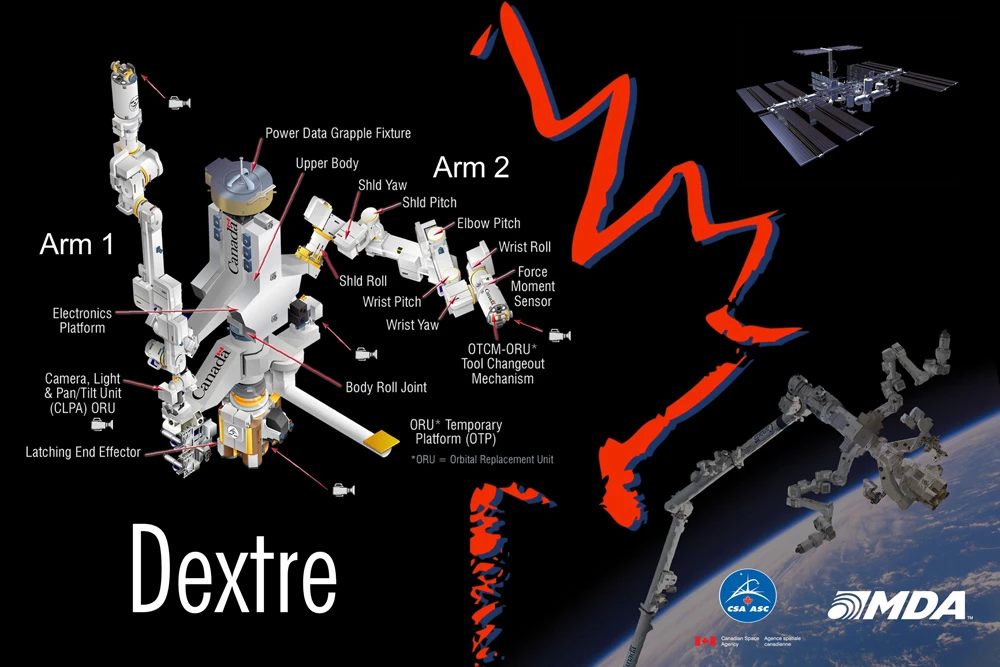
The washing machine-sized RRM was the last payload delivered by a Space Shuttle to the ISS in July 2011 and is designed for the practicing of several tasks needed to refuel satellites in orbit. Meanwhile, the Dextre robot, sitting on the end of the Canadarm2 robotic arm, is equipped with tools and adapters that allow it to carry out a wide variety of functions for refueling operations.
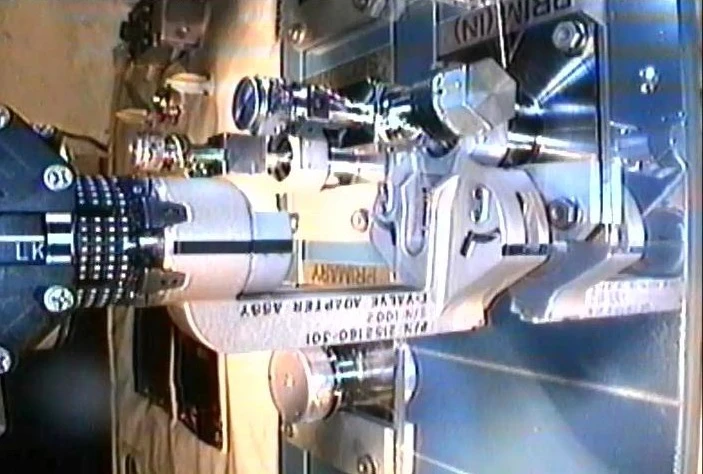
So far, Dextre and the RRM have completed three days of tests under remote control by a Canadian team at the Johnson Space Center in Houston. On January 14, it grasped the RRM Wire Cutter Tool and pulled it out of the RRM module. It then used this to remove a securing wire from a protective cap. After this, it took the RRM Multifunction Tool and then removed the protective Tertiary Cap from a simulated satellite fuel valve.
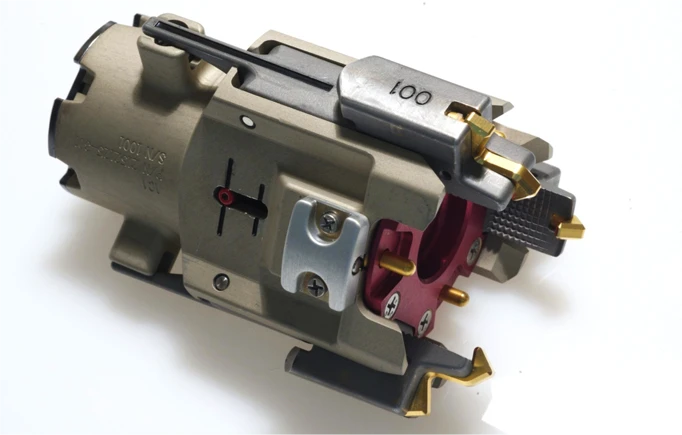
On January 15, Dextre stowed the Tertiary Cap and the Tertiary Cap Adaptor used to remove it. Next, the robot used the RRM Wire Cutter to cut wires on the Safety Cap and then on the Actuation Nut on the fuel valve. It then stowed the Wire Cutter Tool and the Multifunction Tool that had been held in each robotic hand.

January 16 saw a pause in the test while software on Canadarm2 was checked for a possible fault, but resumed on January 17 when Dextre unstowed the RRM Safety Cap Tool from the RRM module, then used it to release the launch torque and check out the functionality of the Safety Cap Receptacle.
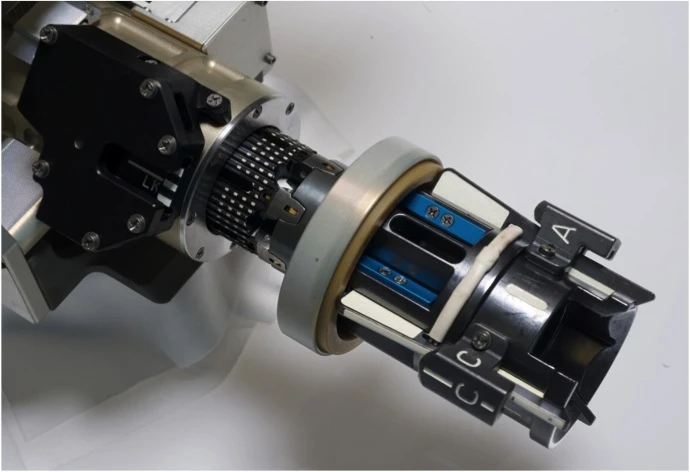
Three more days of tests are scheduled until January 25. Day Four will see Dextre removing the Safety Cap and on Day Five Dextre will attach a nozzle that will allow ethanol to transfer through a tube for a simulated refueling on Day Six.
The video below outlines the refueling test.
Source: NASA






