
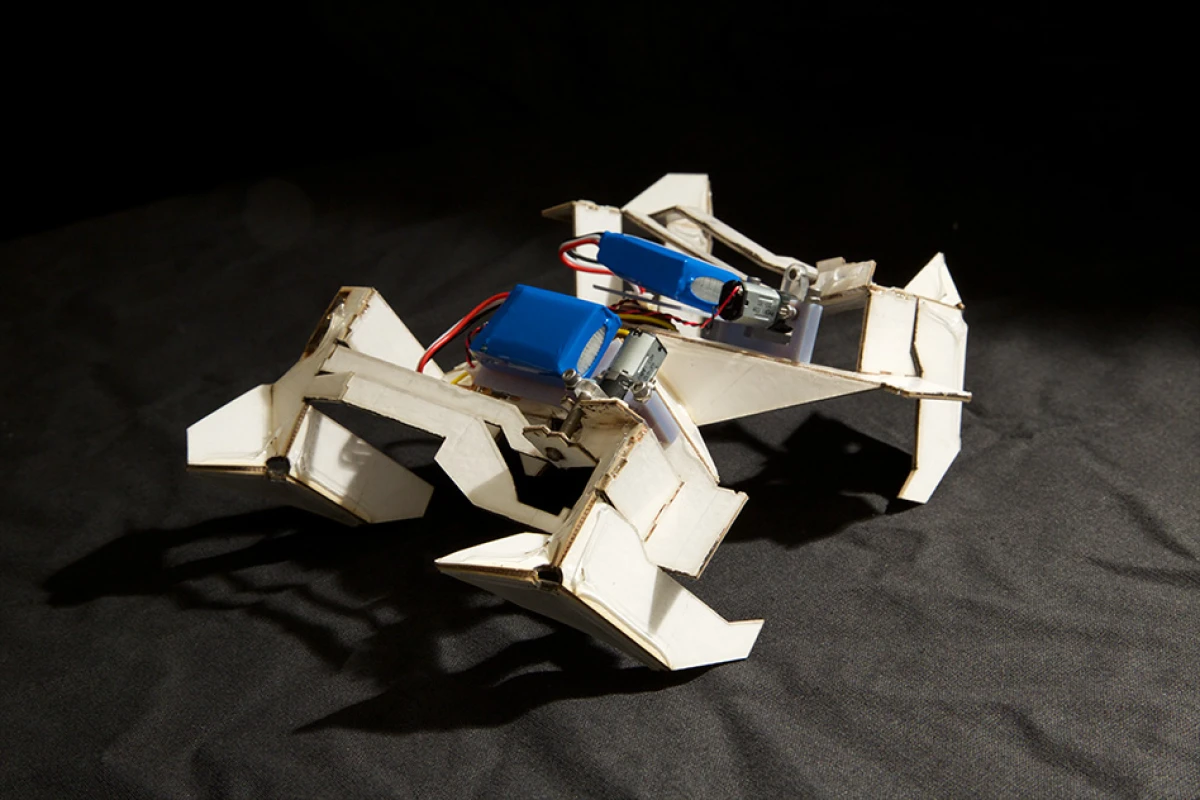

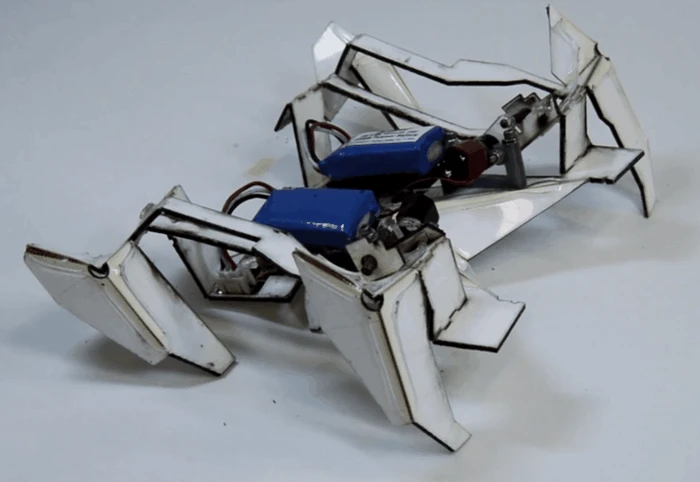
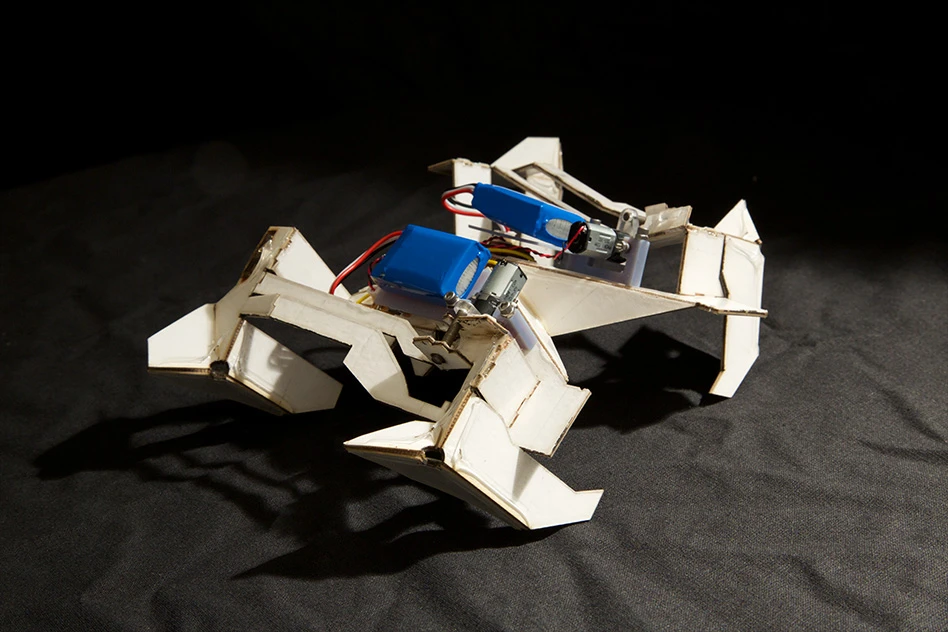
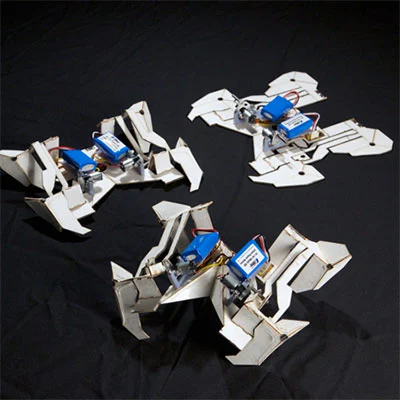
An origami-inspired robot that self-assembles and then scuttles away under its own power has been revealed by researchers from Harvard University and MIT. Still in the experimental stage, the prototype is able to transform itself from a flat structure into a moving, functional machine in around four minutes before scrambling away under its own power at a speed of about 2 in (5 cm) per second.
Built on a 8.5 in (21.5 cm) by 11 in (28 cm) sheet of heat-sensitive polystyrene composite material covered with a pattern of creases and cuts, the robot self-assembles by applying heat to specific areas using an on-board heater to make the plastic bend and shape itself to form the robot's body, frame, and legs. After the heat has been applied and the polymer has cooled into its new shape, the robot then lifts itself up, powers up its legs and moves away.
To achieve this, the composite itself is constructed from five separate layers of materials. The middle layer is made from a sheet of copper that has been laser-etched into an array of electrical connections between the on-board electric motors, actuators, microcontroller and batteries. This layer is then sandwiched between two layers of structural paper which are in turn compressed between the two outer layers that are created from a laser-cut, shape-memory polymer that folds along predetermined paths when heated.

"The exciting thing here is that you create this device that has computation embedded in the flat, printed version," said Daniela Rus, the Andrew and Erna Viterbi Professor of Electrical Engineering and Computer Science at MIT. "And when these devices lift up from the ground into the third dimension, they do it in a thoughtful way."
Gizmag covered Rus's earlier work on folding robots at MIT that were baked in an oven to assemble themselves. This latest work is obviously an improvement on previous efforts, as on-board heaters now apply the heat to the robot’s joints to make them fold.
This time around, besides her other MIT colleagues, Rus is also joined by researchers from Harvard’s Wyss Institute for Biologically Inspired Engineering, where their previous work in such things as the prototype MoBee microbot, also built up the library of information and practical achievements engendered in this current iteration of a folding robot.
Before this current prototype, the researchers had experimented with single-motor and four-motor designs, before settling on two motors. Configured so that each motor operates two of the robot’s legs, the on-board microprocessor synchronizes the motion driving eight mechanical linkages that convert the force exerted by the motor into movement.
"It's called a one-degree-of-freedom structure, in which you just need to turn one crank and the whole thing moves in the way that you want," Explained Erik Demaine, one of the co-researchers and an MIT professor of computer science and engineering. "It lets you transfer just one degree of freedom into a whole complicated motion, all through the mechanics of the structure."
Work on these types of machines promises the development of pop-up devices that could assemble themselves from composite materials cheaply and efficiently, with potential applications from flatpack, self-assembling spacecraft through to shape-shifting robots that could be used to crawl through tight spaces before reassembling themselves to full size in the open.
"It’s very exciting because there is always work to be done between theory and devices," Rus says. "I make robots and love theory, and Erik proves theorems and loves mechanisms. In order for this research to work, you need people who are of the same mind about what is important."
The paper was published this month in the journal Science
The video below shows the robot in action as well as some of the pre-work involved in the research.
Source: MIT, Harvard University





