
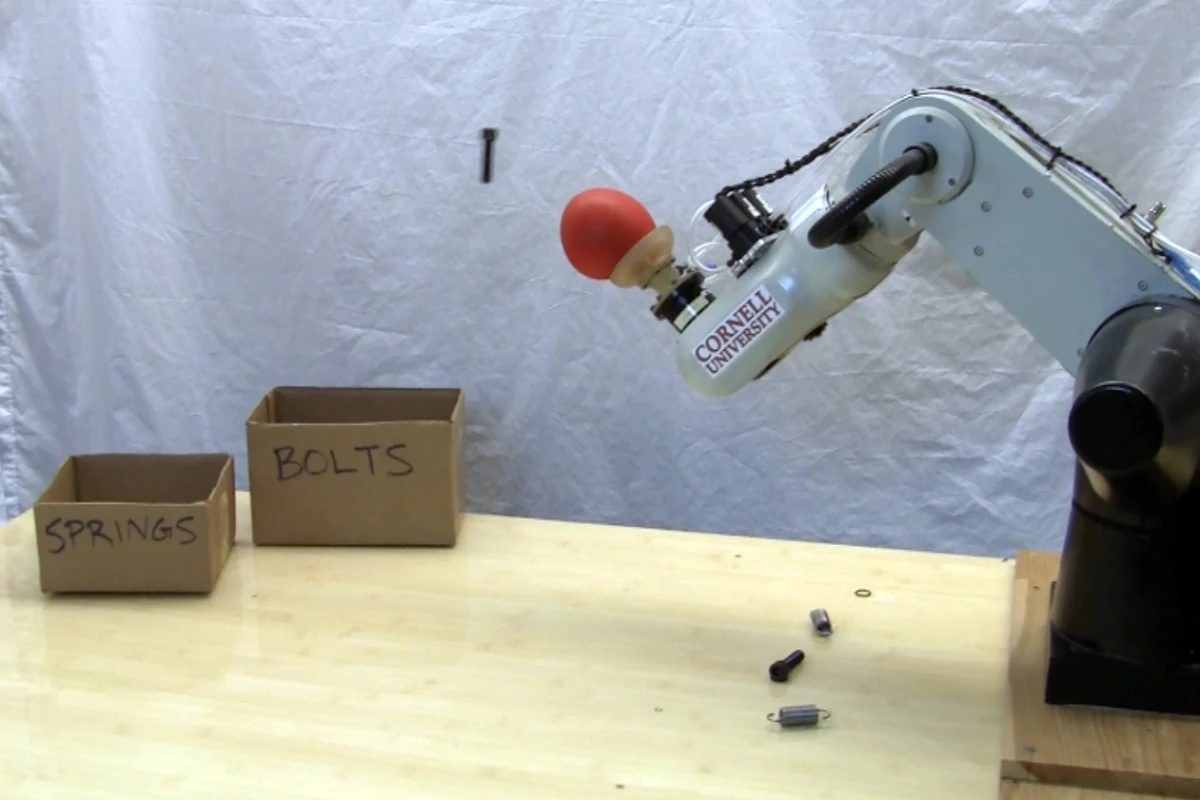
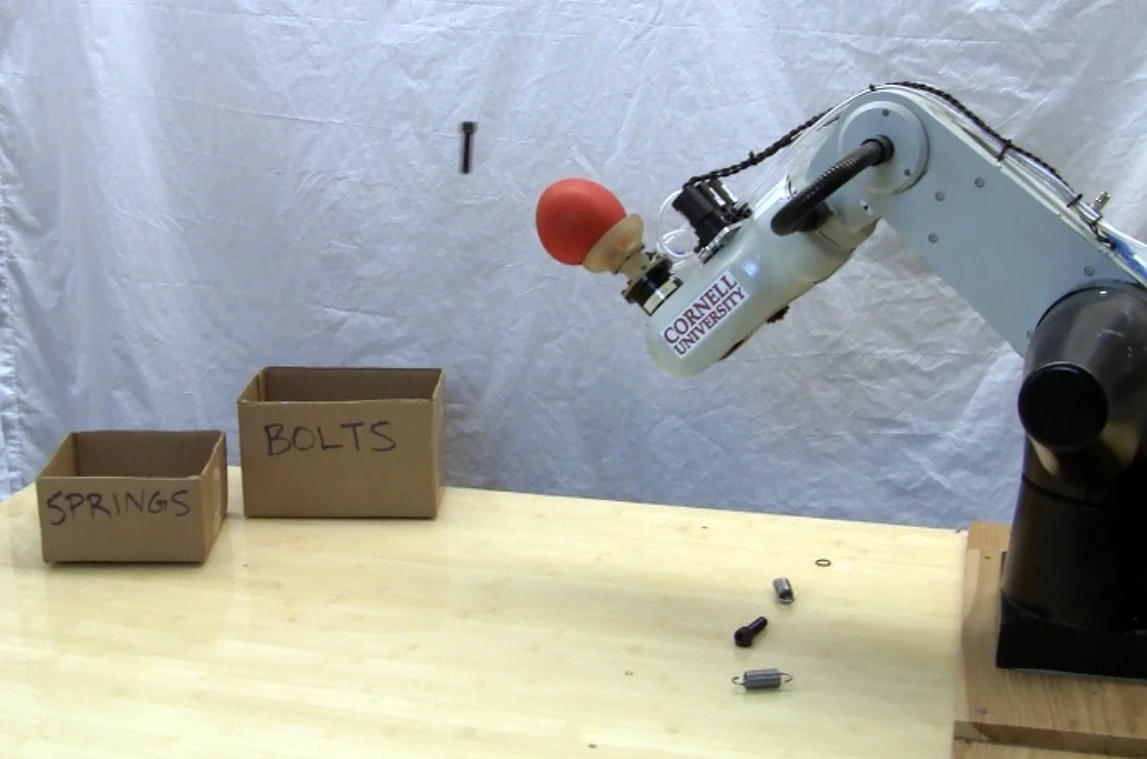


Last year we looked at a universal robotic gripper, which was made by filling an elastic membrane with coffee grounds. The versatile gripper, which is attached to a robotic arm, was able to pick up a wide variety of objects, including a coin or raw egg, which are notoriously difficult for robotic grippers modeled after the human hand to deal with. Now the universal jamming gripper's developers have given it the ability to "shoot" objects some distance, which could enable it to sort objects into different bins, dispose of trash, or maybe even try out for the NBA.
The universal gripper's success lies in the use of coffee grounds, which are able to transition from a fluid-like state that allows it to conform to an object, to a solid-like state to strengthen its grip when air is sucked out of the membrane.
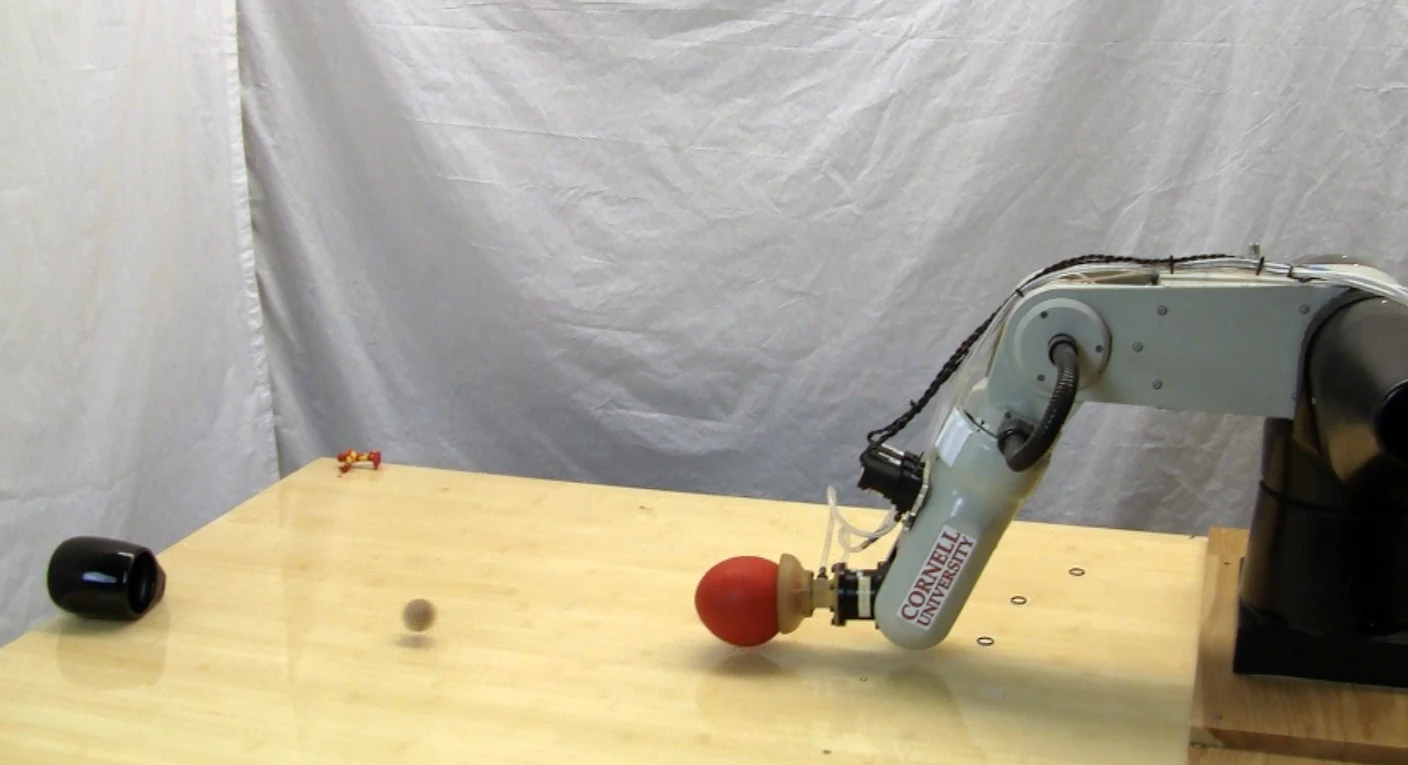
Previously, the robotic gripper released objects simply by releasing the vacuum that was providing the negative air pressure to jam the coffee grounds together and grip the object. But the team, consisting of mechanical engineers from Cornell University and physicists from the University of Chicago, found that after repeated gripping, the gripper would sometimes fail to reset to its original state. To rectify this they decided to reverse the air pressure to release objects and return the gripper to a deformable state. While they were surprised at the performance increase this approach provided, they were even more surprised to discover it gave the gripper the ability to "shoot" objects some distance.
While we've seen robots with the ability to throw (and catch) before, these are generally modeled after the human arm and hand and rely on the momentum from the arm motion and the releasing of the grip at the optimum time to throw an object. The universal gripper's throwing mechanism is much simpler and cheaper, relying on only the arm aiming and a blast of high-pressure air to eject an object fast enough that it travels some distance. It is also much more flexible than grippers inspired by the human hand, with the ability to conform to and grip a wider variety of objects than is possible with robotic fingers that often have difficulty gripping or exerting the right amount of force to pick up oddly shaped or fragile objects.
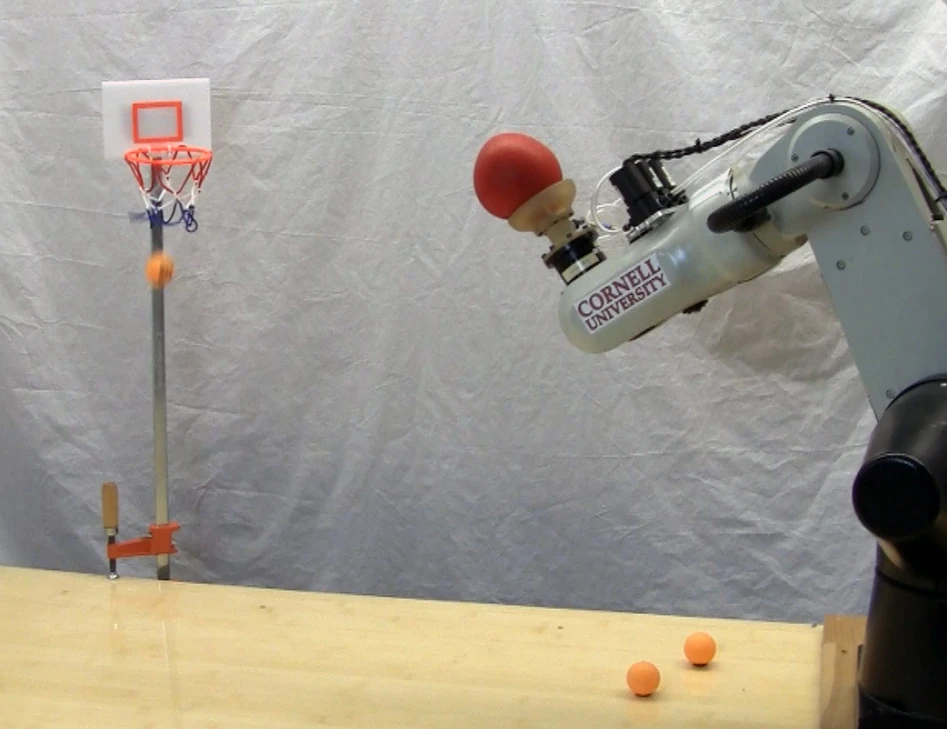
While the versatility of the gripper already made it suitable for picking up a variety of objects - including multiple objects at once and objects it had never encountered before - the researchers say the new-found shooting capability could also allow robots to extend their workspace. While it wouldn't be suitable for high-precision applications, the researchers say it could provide robots with the added flexibility required for unstructured environments, such as the home. They list sorting objects into different bins or throwing away trash as possible applications for the technology, while the video below reveals the universal gripping robot is also a deft hand at shooting baskets or throwing darts.
The research collaboration between Cornell University and the University of Chicago was supported by DARPA's Defense Sciences Office (DSO) through a U.S. Army Research Office grant. The team plans to continue further development of the gripper with a long-term view of applying the jamming in a more general way to adaptive robots that could potentially reconfigure themselves, move using the process, or recover from damage.
Source: Cornell Creative Machines Lab





