





Effectively, these bots are built in segments, and each segment has its own multicopter propulsion unit, capable of vectoring thrust in any direction thanks to multi-axis gimbal systems. The segments are joined together, but capable of articulating in a range of different directions, and the team has worked out how to co-ordinate all these propulsion systems in real time, even as the structure changes shape while it flies. The concept was originally inspired by the thought of flying dragons, and the way these mythical beasts could smoothly undulate their bodies in the air.
"When I was a child, I'm from China, so I was always dreaming of dragons," says project leader and Assistant Professor Moju Zhao. "There are lots of bio-inspired robots, people make robot dogs, robot cats. The dragon is not a real animal, but it's a kind of holy symbol in Asia. Imagine this robot as a flying human arm, to do manipulation in the air. To change a lamp, or open a door like a human arm. You could also think this robot can transform like a snake; it can explore very narrow spaces."
In the video below, you can see the state of the team's "Dragon" robot. It's a little wobbly and a little slow, but considering the complexity involved in controlling a multirotor aircraft that's continually changing its structural shape and orientation, it's highly impressive. The robot is shown beginning to handle basic tasks, like pushing and pulling objects, and curling around on itself to create a flying gripper ring capable of grabbing, compensating for, manipulating and releasing objects up to 1 kg (2.2 lb) in weight.
It's a pretty extraordinary idea, a flying claw sort of deal that could snake its way around an area, grab things and do useful tasks with them. Another video shows the Dragon using pin-like attachments to open and close large valves, in upwards, downwards and horizontal orientations.
The team has been working on the Dragon for a number of years now, and it's easy to see the potential of such a wildly flexible aerial platform once the flight control software gets quicker and it begins moving with more speed and fluidity.
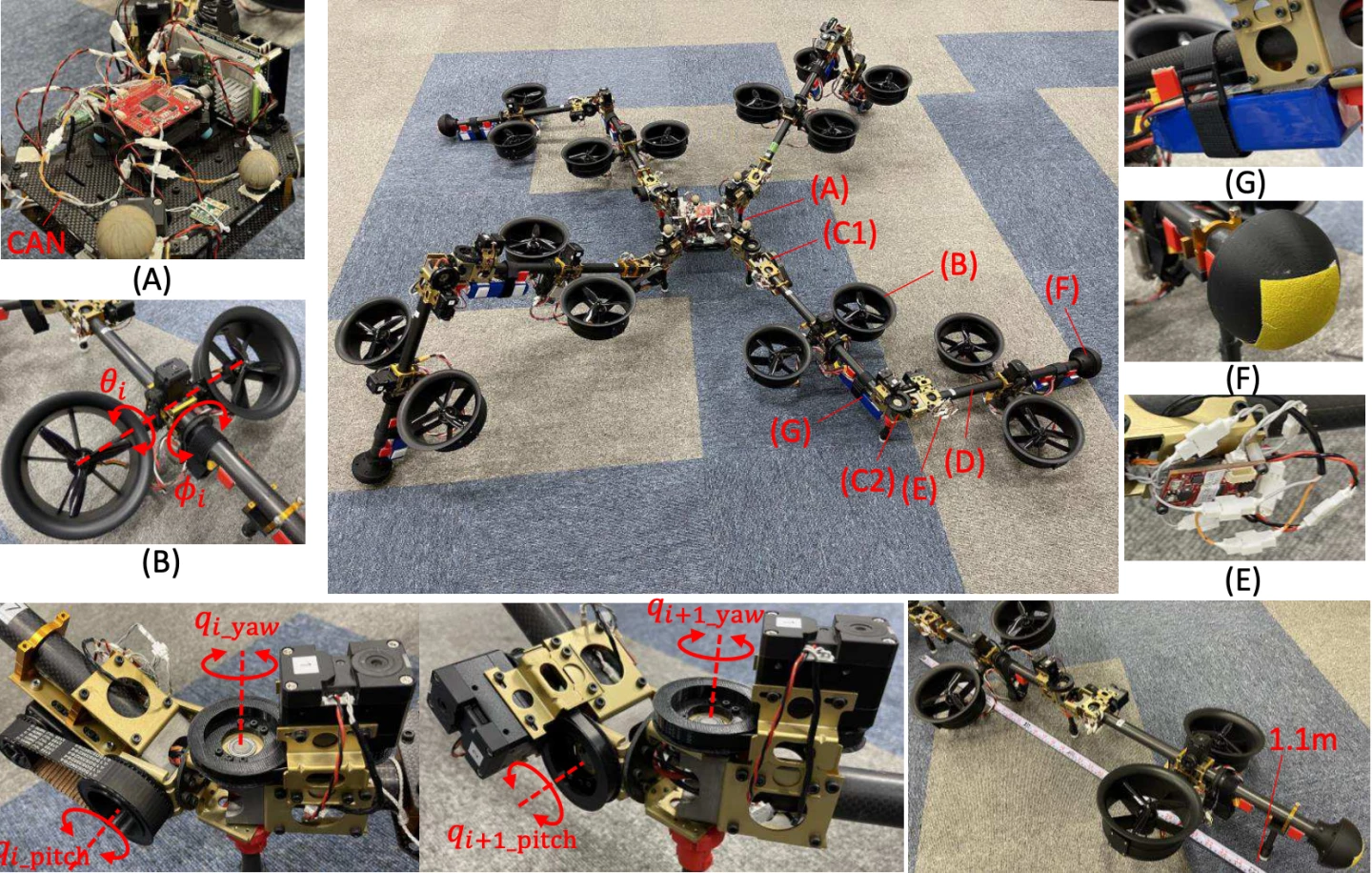
Now, the team has presented an even stranger take on the concept, in the form of its new "SPIDAR" robot, a torturous acronym for "SPherIcally vectorable and Distributed rotors assisted Air-ground amphibious quadruped Robot."
The SPIDAR is a quadruped robot with articulating joints at the hip and knee of each leg. These joints are weakly motorized to assist with movement, but the team sought to minimize redundant motors by using the vectored multicopter propulsion units on each segment as the primary means to move the legs – as well as to lift the entire 15 kg (33 lb) structure into the air.
As the video below shows, what you end up with is an extremely slow and noisy spider robot, whose legs look weak and wobbly at this stage. It also looks like it's working hard to stay airborne, with harmonic vibrations among the propulsion units clearly a problem. The walking motion looks a little pointless – it can walk for 20 minutes, or fly for nine minutes on its current battery setup, and it's immediately obvious that one minute of flying will take this thing further than 10 minutes of walking.
But it still raises some very cool possibilities; with a little more development, this will become a four-point flying claw gripper potentially capable of holding and manipulating two objects at once; taking the lid off a jar, for example, or holding a box while picking something up and putting it in the box.
Clearly, these are very early prototypes. But with a little imagination, we can see these developing into Matrix-style flying squid robots with as many arms as is practical. With propulsion units on each tentacle or leg segment, the arms aren't dead weight on the airframe; each is a support, and can provide lift with varying degrees of leverage depending on where the load's at. Such machines could perform multiple tasks at once, potentially locking their free "arms" to brace their structures against walls, ceilings, floors or other solid objects where extra force or leverage is needed.
It's a fascinating concept, with the potential to create some remarkable and useful flying robots with capabilities and forms we've not really seen in nature – they've been the stuff of myth and sci-fi. Very neat.
A paper on the Spidar robot is available here.
Source: Moju Zhao/University of Tokyo via IEEE Spectrum



