

All of the quadrupeds we cover have rigid one-piece bodies, which seems to be a good shout for most of the antics they get up to. But a flexible spine might be better in certain climbing situations, and that's where the KLEIYN robodog could shine.
As we've seen from the likes of the ANYmal, Lynx and Go2, quadruped robots with rigid backs are not only useful for hauling equipment but pretty agile too. But having some flex could be useful too, if they need to squeeze into tight spaces such as climbing up the inside of a chimney, for example.
Scientists at the same University of Tokyo lab that brought us an anatomically correct musculoskeletal robot, a flying DRAGON and a humanoid chauffeur have introduced a robodog with a jointed back to tackle just such a task, as well as attacking varied-height terrain – like you might find in disaster sites – with ease.

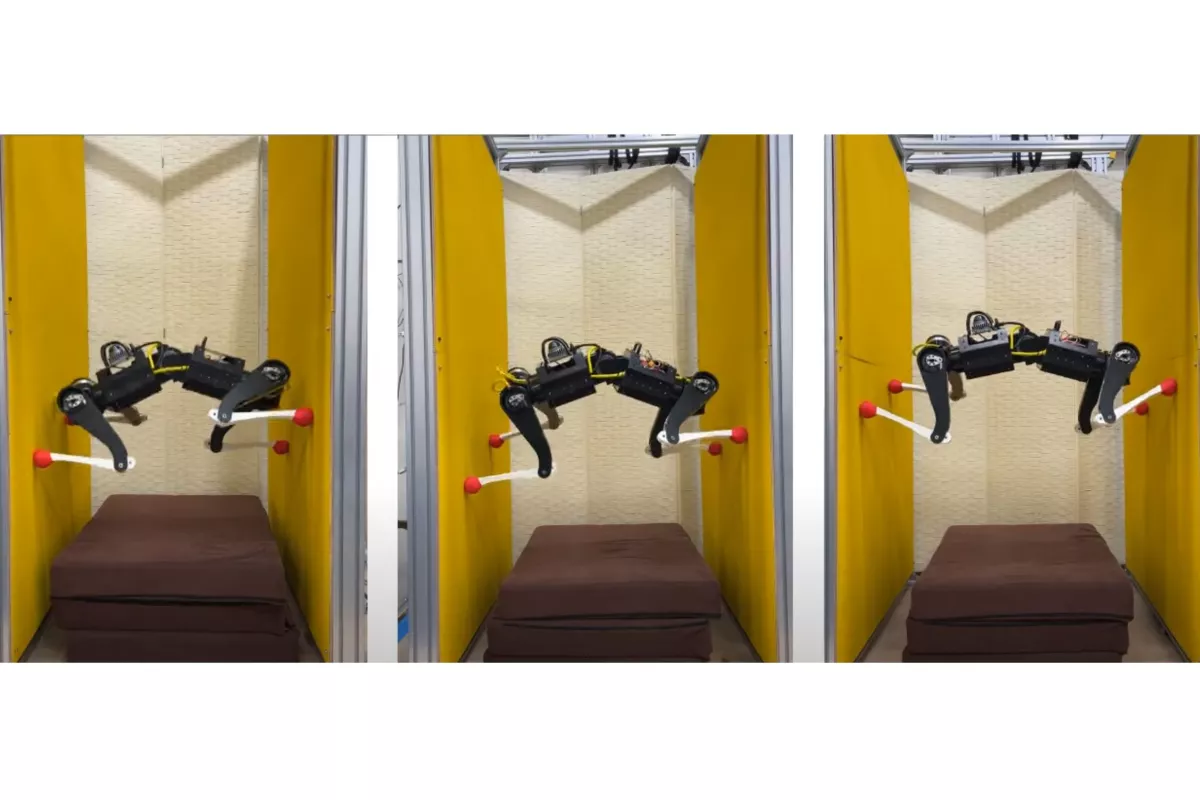
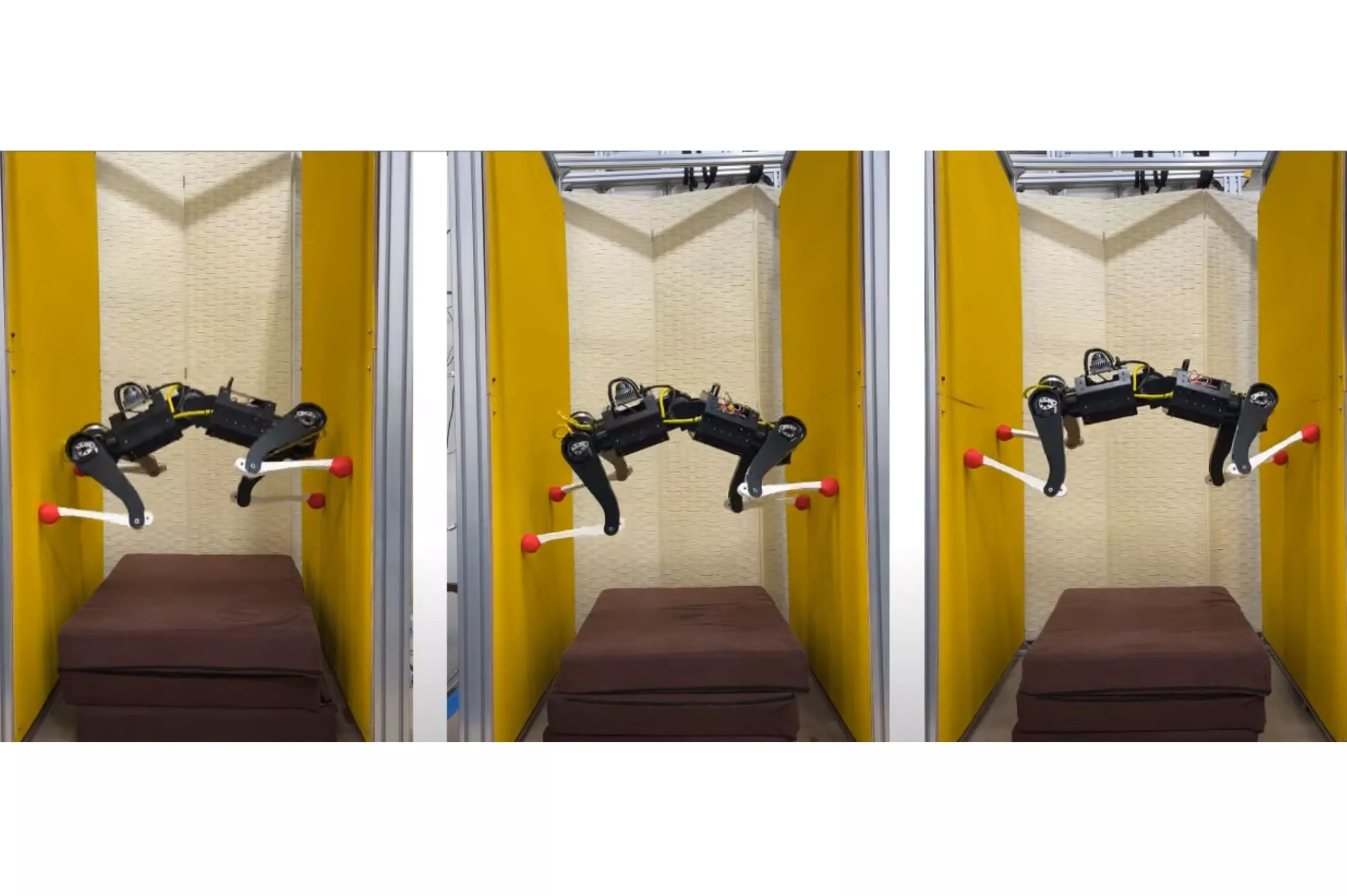
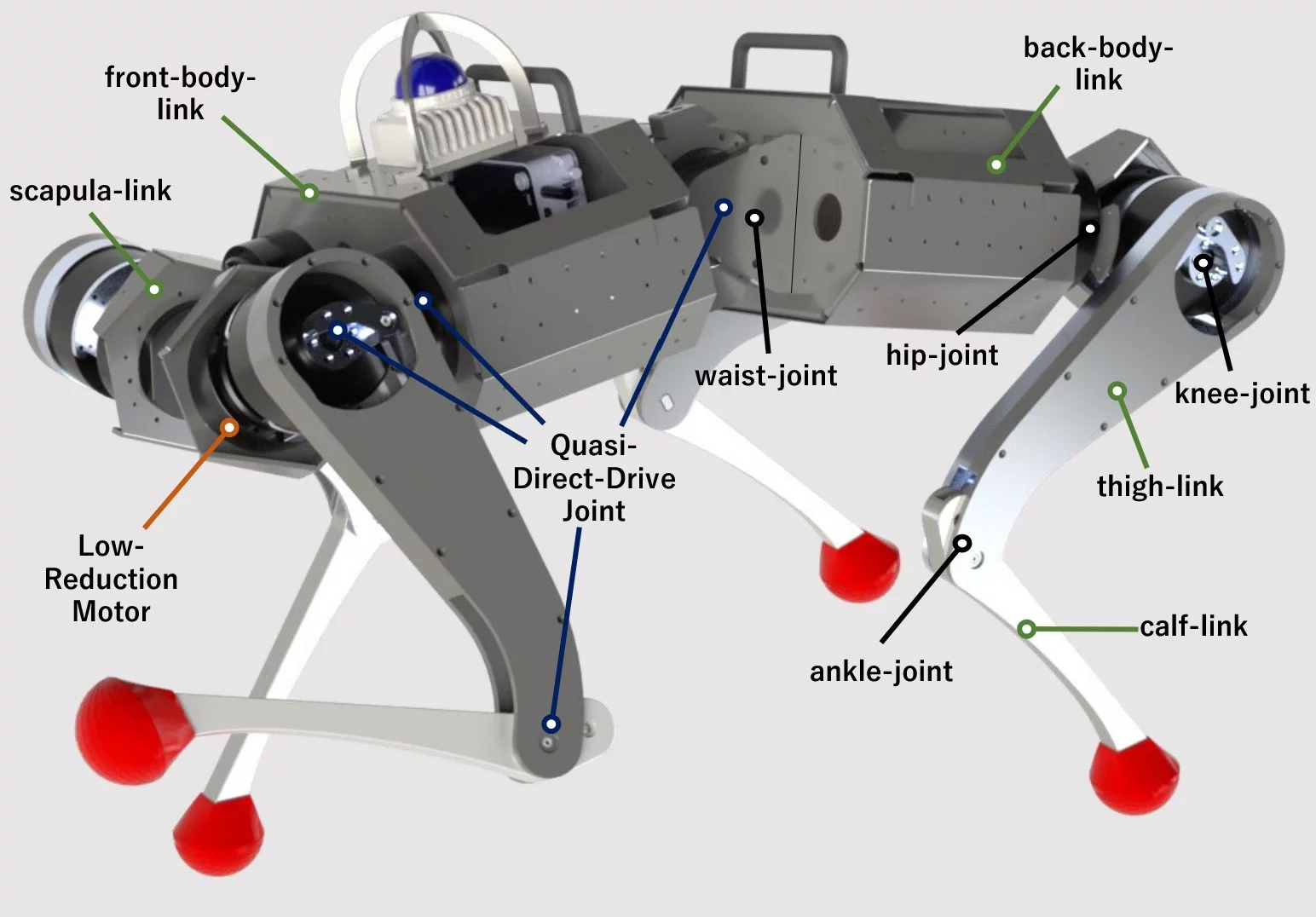
That waist joint means that the back can be arched slightly to reduce the body length of the robot, or flexed to navigate through complex environments. Rather than mount grippers or claws to the ends of the feet to help KLEIYN grasp uneven vertical surfaces and defy gravity, the JSK team opted to have the leg joints exert sufficient pressure against opposing smooth walls to keep the robot aloft.
Each leg has three degrees of freedom plus a pitch-axis joint at the "shoulder" and rear "knee." All leg joints sport actuators with a 1:10 reduction ratio and torque of 25 Nm (18.4 lb.ft). Where both "calf" links of robodogs like the Go2 and Lynx face the same way, the JSK bot has them facing opposite directions for better vertical contact at the pads without impacting its walking gait.
The waist joint has one degree of freedom and 1:9 reduction ratio gearing at the 40-Nm (29.5-lb.ft) motor. It's attached to identical body boxes wrapped in aluminum that house components like the battery and onboard computer – one to the front that's topped by a LiDAR unit with built-in IMU and another at the back.
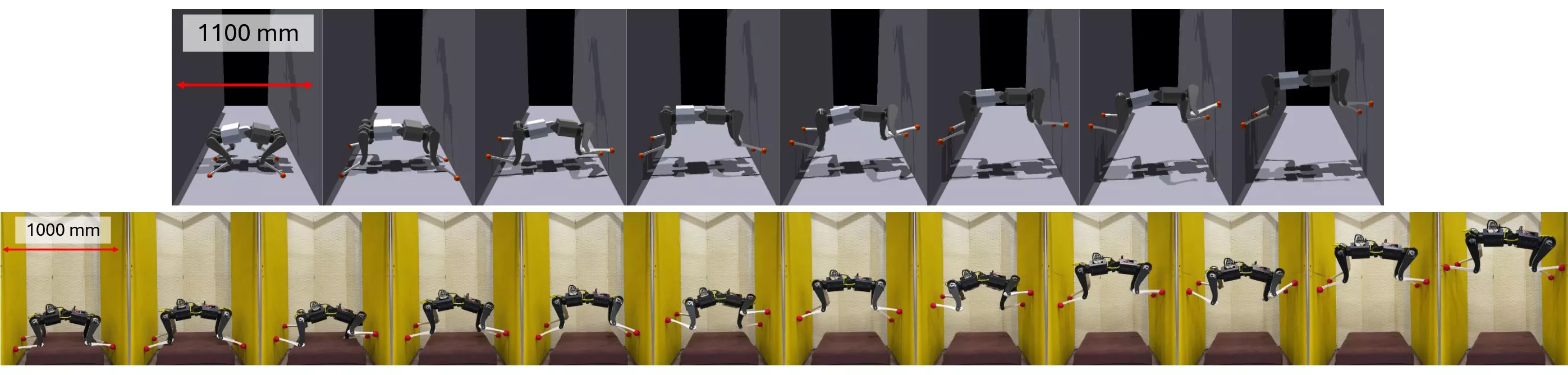
The researchers employed a novel reinforcement learning platform called Contact-Guided Curriculum Learning to give the quadruped the virtual experience needed to master its chimney climbing chops from a standing position. After training in virtual spaces, the team erected two ply boards to form three sets of walls, each with a different gap width between them – 800, 900 and 1,000 mm.
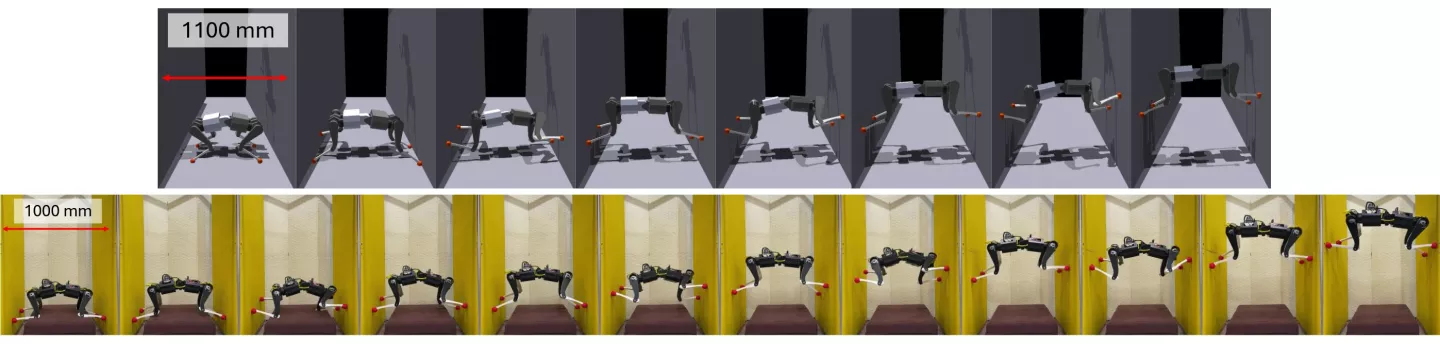
The quadruped was then sent a command to climb. In the case of the 800-mm gap, the robot managed climb speeds of up to 170 mm per second, which the team says is 50x faster than UCLA's RoMeLa SiLVIA hexapod – which is reported to scramble up at 3 mm/s. The team also tested regular locomotion, tackling stairs and walking over uneven surfaces.
The KLEIYN robodog weighs in a 13 kg (28.6 lb), stands 400 mm (15.7 in) tall, and has a straight body length of 760 mm (~30 in). Practical applications for industrial inspections are fairly obvious, but search and rescue operations might also benefit from this versatile design and virtual learning platform.
A paper on the project is available on arXiv. The video below has more.
Source: JSK


