



Lately, we've seen some exciting advances in the development of robots that can interact with objects in interesting ways, ranging from grippers that work like elephant trunks to coil around odd items to others that use electroadhesion to grasp fragile things like eggs. A new example from MIT scientists takes this to a whole other level, or perhaps down one, with the ability to dig into granular media to get a sense of objects buried beneath the surface.
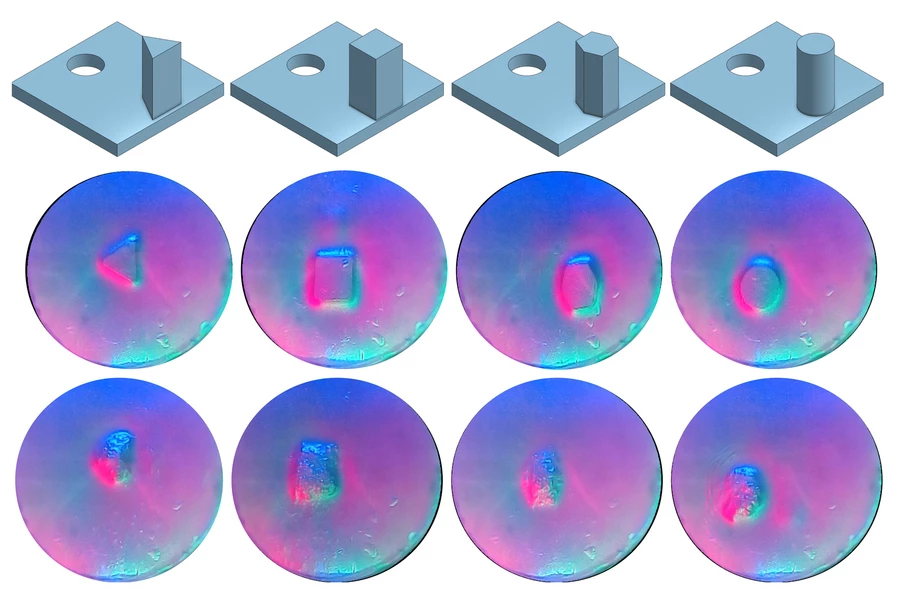
The newly demonstrated Digger Finger is a continuation of previous work from MIT researchers on what's called GelSight. This tactile sensor features a clear gel covered in a reflective membrane that uses a set of LED lights to create unique light patterns as it interacts with objects and deforms, with an onboard camera analyzing these patterns to gauge the 3D shape of the contact area, in essence acting as an artificial sense of touch.
Looking to build a robotic system that could sense objects submerged in granular material like sand or gravel, the scientists took the GelSight technology and made some tweaks to the design. This involved changing the shape so it represented a thin cylinder with a beveled tip, and swapping out two of the three LEDS and then adding some colored fluorescent paint to save space.
This far smaller, finger-like device was then mounted onto a robotic arm, which gave it the ability to poke its way through material like fine sand and rice, twisting or vibrating gently as a way of clearing obstructions to the sensing area and avoiding jams. These settings need to be configured depending on the type of material and size and shape of the grains that the finger is attempting to dig through, though the sharp-tipped robotic finger proved capable of making its way through to sense the shape of submerged objects.
The scientists see the technology as something that can fill a gap in sensing technologies that detect subsurface objects, like ground penetrating radar, which may be unable to differentiate bone from rock, for example.
“So, the idea is to make a finger that has a good sense of touch and can distinguish between the various things it’s feeling,” says study author Edward Adelson. “That would be helpful if you’re trying to find and disable buried bombs, for example.”
In addition to disarming bombs or buried land mines, the technology could also be used to find or inspect buried cables. Looking forward, the scientists see it helping to accelerate the technology around artificial touch and take it into new territory, pointing to the highly complex environments that human fingers operate in as inspiration, such as feeling for tumors during surgery.
“As we get better at artificial touch, we want to be able to use it in situations when you’re surrounded by all kinds of distracting information,” says Adelson. “We want to be able to distinguish between the stuff that’s important and the stuff that’s not.”
The project is to be presented at the upcoming International Symposium on Experimental Robotics, and a paper describing the Digger Finger technology can be accessed online.
Source: MIT


