
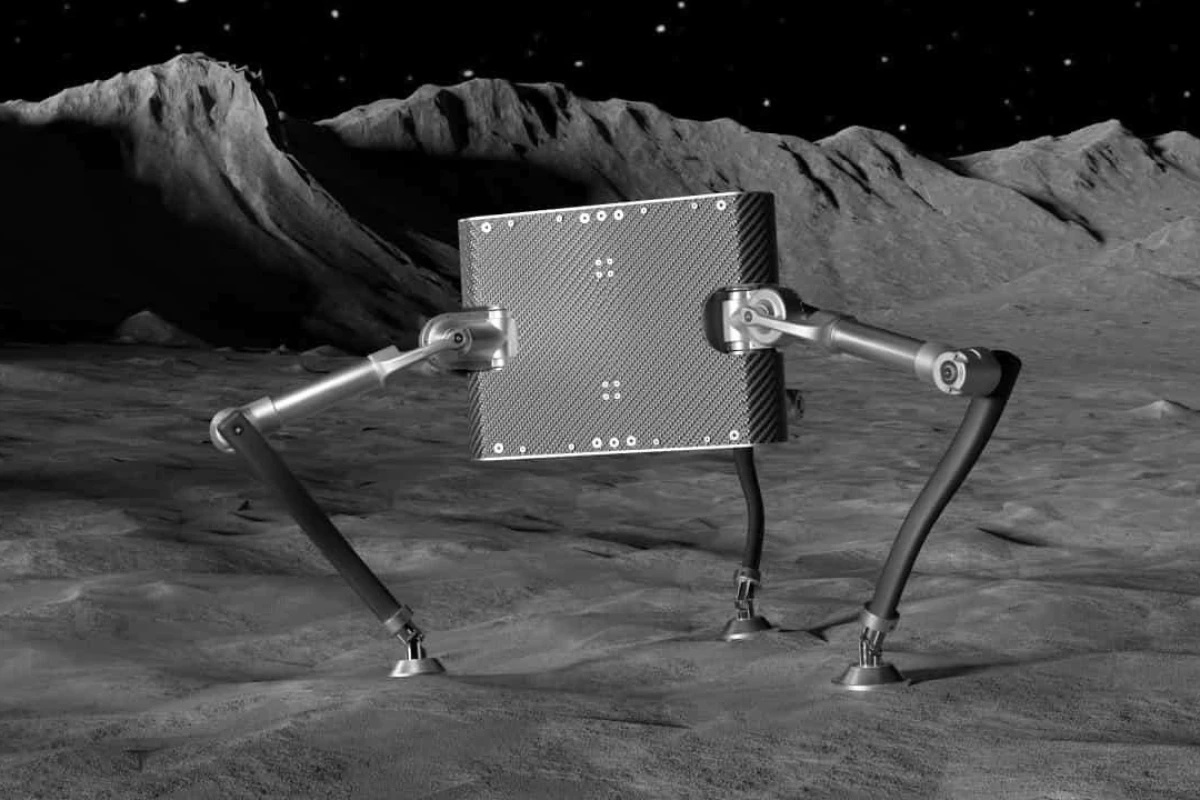


A three-legged robot could one day be hopping across the surface of asteroids, searching for valuable minerals. Known as the SpaceHopper, the bot was recently put to the test on a zero-gravity aircraft flight.
The SpaceHopper program was first launched two and a half years ago, as a student research project at ETH Zurich university in Switzerland.
It's aimed at addressing the challenge of efficiently exploring low-gravity celestial bodies such as asteroids and moons. Not only might such bodies contain much-needed substances like rare-earth metals, they could also help scientists better understand the formation of the universe.
In its current form, the SpaceHopper robot consists of a triangular aerospace-aluminum body with an articulated leg at each corner. Each of those three legs in turn has a knee and a hip joint – two motors move the hip via a differential drive mechanism, and another motor moves the knee.

Onboard deep-learning-based software controls the combined movements of the legs, allowing the robot to perform a series of specific functions. These functions include initiating hops, keeping the bot's body correctly oriented while in flight, and performing controlled landings at predetermined locations.
All nine leg motors work together to launch the SpaceHopper high off the asteroid's surface when jumping. As the robot is subsequently in flight, it maintains its upright orientation by selectively extending or withdrawing its legs to shift its center of mass as needed. Upon landing, its legs flex to absorb impact and to keep the bot from falling over.
Initial tests of these functions were performed in an ETH Zurich lab, where the robot was attached to a counterweight and a spinning gimbal to simulate the low-gravity conditions of the dwarf planet Ceres.
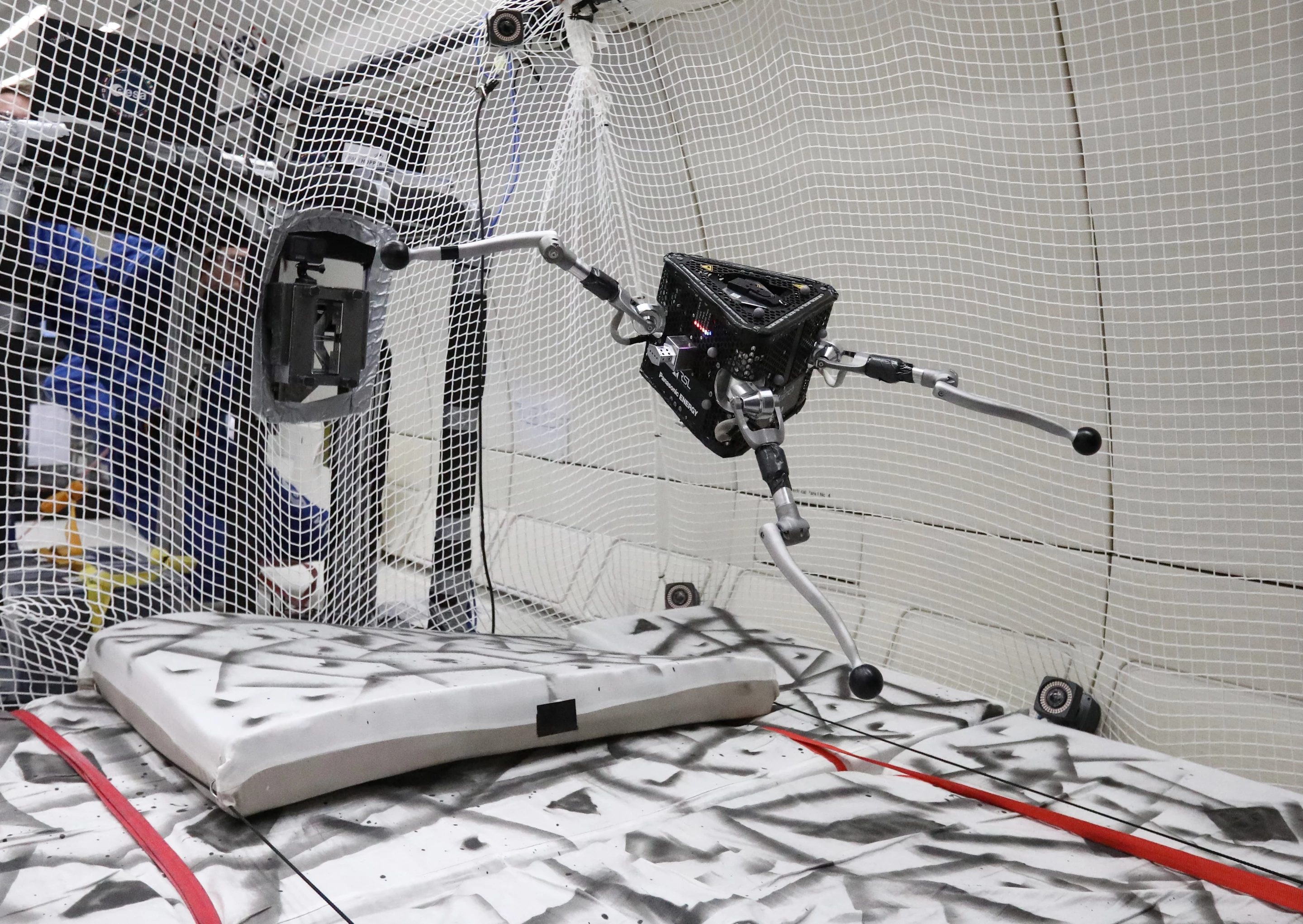
Late last year, however, members of the student team got to take the SpaceHopper on an Air Zero G parabolic flight hosted by the European Space Agency and French company Novespace. In these kinds of flights, an Airbus A310 airliner flies in a series of upward and downward arcs, producing short periods of weightlessness within the plane as it does so.
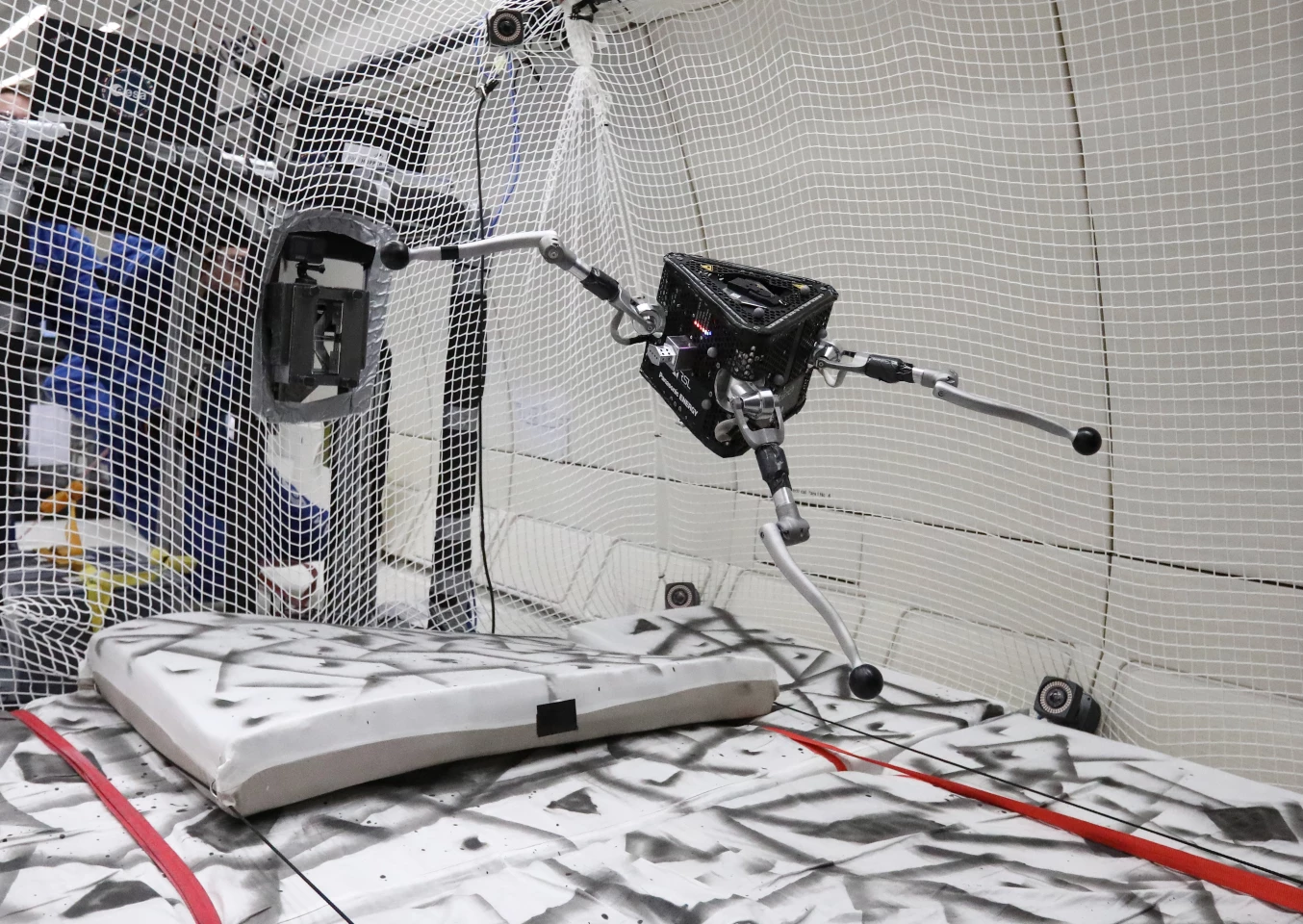
During the 2023 flight, the robot repeatedly jumped off the floor of the aircraft – in a specific direction – and kept itself correctly oriented once airborne. Highlights of the tests can be seen in the video below.
It should be noted that an ETH Zurich team previously developed a four-legged asteroid-hopping robot called the SpaceBok. The SpaceHopper's three-legged layout is intended to reduce size and weight as compared to that design. In fact, at a total weight of 5.2 kg (11.5 lb), the robot could conceivably be carried in and deployed from a small unmanned CubeSat spacecraft.
Sources: ETH Zurich, SpaceHopper


