


You may not know what a springtail is but man, those little things can jump! Scientists have now copied the creatures' jumping mechanism in a small robot that could one day explore places that people can't go.
Although they may look like insects, springtails are actually tiny six-legged hexapods that live in – and feed upon – decaying organic material such as dead leaf litter.
Most types of them measure no more than about 2 mm in length, yet when they sense danger, they're capable of jumping to heights of up to 62 mm (2.4 in) and over distances as far as 102 mm (4 in). What's more, they do so within a matter of milliseconds.
Springtails execute their amazing jumps via a tail-like, spring-loaded appendage known as the furcula. It's ordinarily folded up beneath the body and held under tension by a structure called the retinaculum. When the furcula is released from the retinaculum it snaps down hard against the group, flinging the animal into the air.
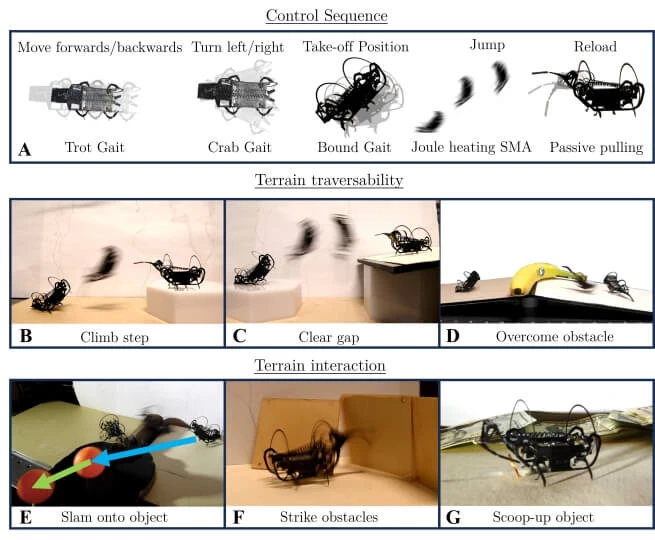
A Harvard University team led by Prof. Robert J. Wood has now created a mechanical version of that mechanism, and added it to an existing 4.4-cm (1.7-inch)-long insect-inspired robot known as the HAMR. Its name an acronym for Harvard Ambulatory MicroRobot, the bot uses its four ceramic-actuator-powered legs to scramble across the ground at speeds of up to 8.4 body lengths per second.
In fact, if you put foot pads on those legs, it can even scuttle across the water's surface.
The artificial furcula that was added to the robot consists of a striking arm that is held under the rear end of the body by a parallel linkage made up of tensioned shape-memory alloy actuators. When that arm is electronically released, it whips down and strikes the ground, propelling the robot upward within just 14 milliseconds.

In lab tests, the 2.2-gram bot managed a maximum horizontal jumping distance of 1.4 m (4.6 ft). Given the fact that the robot measured 6.1 cm (2.4 in) with the added furcula, that distance worked out to 23 body lengths.
While that figure surpassed the jumping distance of any same-sized insects, it was only half as much as a previously developed jumping robot of a similar size. That said, the other robot weighs 20 times more than the modified HAMR, making it far less energy-efficient.
It should be noted that the HAMR still can also walk like it always has. The jumping could come in handy for tasks such as traversing gaps, going over obstacles, or even hitting lighter obstacles to move them out of its way.
Possible future applications for descendants of the robot could include the inspection of hazardous areas, searching for trapped survivors in disaster-site rubble, or even the exploration of other planets.
A paper on the research was recently published in the journal Science Robotics. You can see the robot in springtail-inspired jumping action, in the following video.
Source: Harvard John A. Paulson School of Engineering and Applied Sciences


