



Rigid steel-and-plastic robots have their place, but some applications require a softer touch. Already in development are light-powered tiny caterpillars, chemical-powered squishy octopi, and a robot with a firm body and soft legs that can tackle tricky terrain. Now, a Harvard team has created a similar semi-soft robot inspired by insects that is made using drinking straws and moves by inflating bladders.
Soft robots may be gentler on surrounding furniture and people, but they aren't the most nimble of of machines. The Harvard team, which is responsible for last year's Octobot, wanted to change that, and looked to insects and spiders for inspiration.
"If you look around the world, there are a lot of things, like spiders and insects, that are very agile," says George Whitesides, lead researcher on the study. "They can move rapidly, climb on various items, and are able to do things that large, hard robots can't do because of their weight and form factor. They are among the most versatile organisms on the planet. The question was, how can we build something like that?"

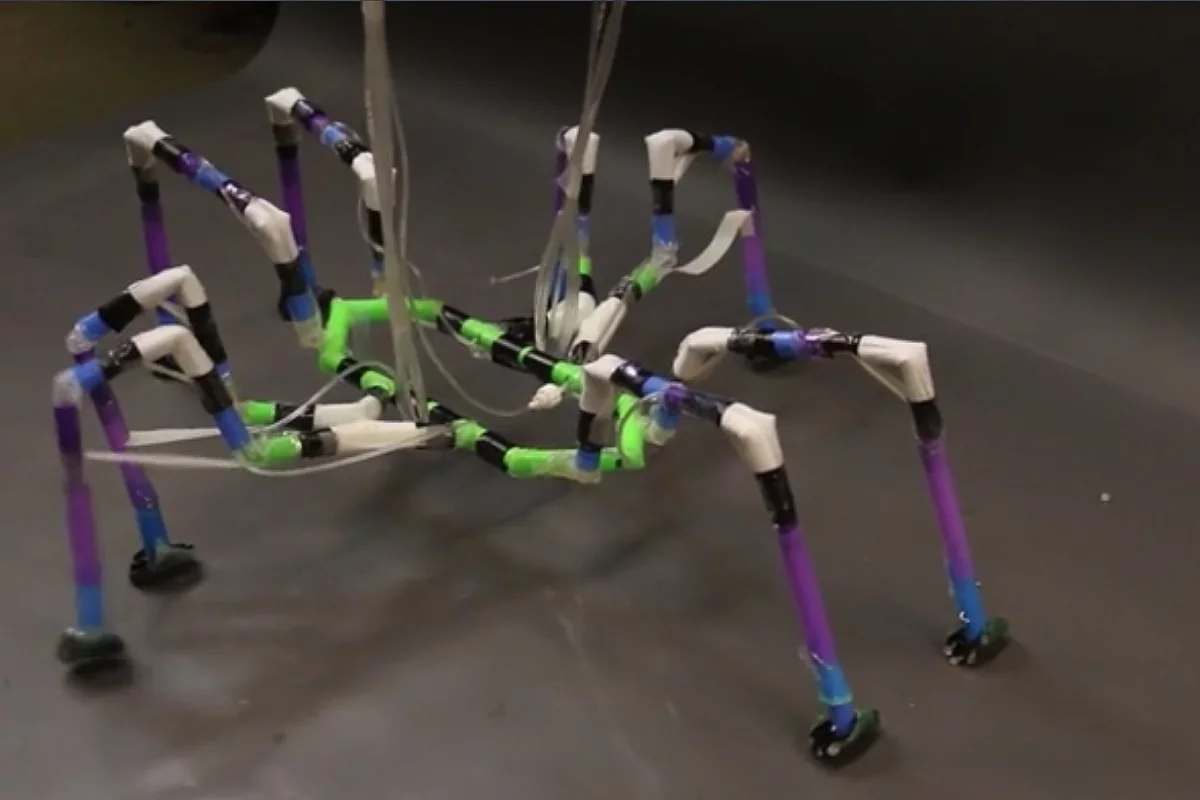
To start with, the team cut slits into regular plastic drinking straws to make them bendable. Then, they threaded tubes into these notches, and attached strips of rubber to each side to act as tendons. When the tube is inflated, the joint extends outwards, and when it deflates, the tendon bends the limb back.
From that simple starting point, the team gradually built up robots with more and more legs. The first was essentially just a straw that could drag itself forward. Adding a second leg at the other end, the robot could move by both pushing and pulling itself, and a third let it stand like a tripod. By the time they got to six legs the robots were walking like ants, guided by an Arduino microcontroller. With eight legs, the team was bumping up against the limits of complexity that the system could handle. However, due to the light weight of the materials, the robots were even able to float on water and drag themselves along the surface.
"A spider has the ability to modulate the speed at which it extends and contracts its joints to carefully time which limbs are moving forward or backward at any moment," says Alex Nemiroski, co-author of the study. "But in our case, the joints' motion is binary due to the simplicity of our valving system. Either you switch the valve to the pressure source to inflate the balloon in the joint, and thus extend the limb, or you switch the valve to atmosphere to deflate the joint and thus retract the limb. So in the case of the eight-legged robot, we had to develop our own gait compatible with the binary motion of our joints. I'm sure it's not a brand-new gait, but we could not duplicate precisely how a spider moves for this robot."

Using straws makes it sound like a high-tech craft project, but once the prototype has proven the concept, future models could be built with lightweight structural polymers instead. Eventually, these "arthrobots" could find use in search and rescue missions in disaster areas – possibly with help from some cyborg cockroaches.
"What's really attractive here is the simplicity," says Nemiroski. "For all the complexity of movement and structural integrity we get out of these robots, they're remarkably simple in terms of construction and control. Using a single, easy-to-find material and a single concept for an actuator, we could achieve complex, multidimensional motion."
The research was published in the journal Soft Robotics, and the different robots can be seen in action in the video below.
Source: Harvard


