


In robotics, as in all engineering, life is a series of tradeoffs. For example, hard robots can move faster and are a better base for electronics and other components, but are more dangerous to people around them, and hard components concentrate force at the point of impact; making them prone to breaking. Meanwhile, soft robots are safer and more flexible, but they tend to be slow, especially when accomplishing tasks without being tethered to power sources, and deform badly on impact like a sock full of jelly.
In nature, animals commonly mix soft and hard structures. In an effort to emulate this, engineers from Harvard University and the University of California, San Diego, have used multimaterial 3D-printing to create a combustion-powered jumping robot that transitions from a rigid core to a soft exterior.
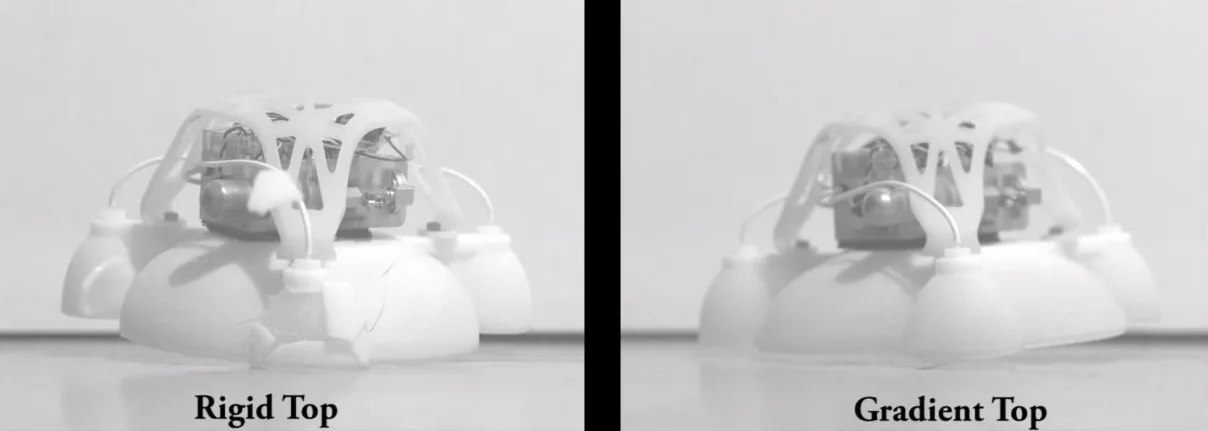
The design consists of two nested hemispheres around a rigid core module that holds a miniature air compressor, a butane fuel cell, and other parts. The top hemisphere is printed in a single piece, but has nine different layers of stiffness, so is rigid in the center, but rubbery at the edges.
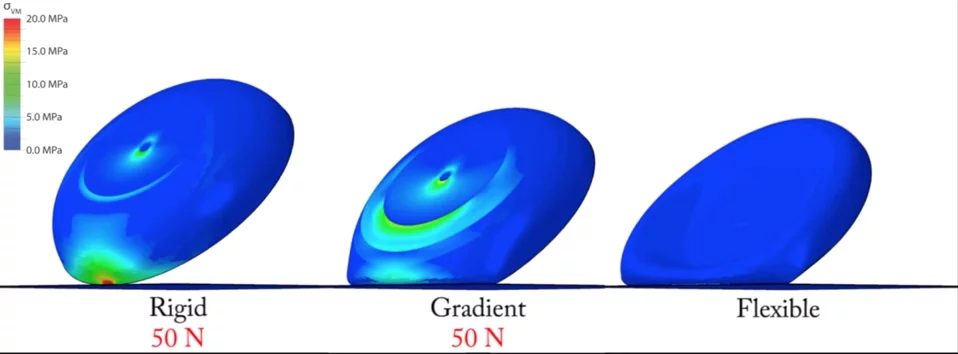
Underneath these, the robot’s bottom half is a flexible construct that holds a combustion chamber, where the butane mixes with oxygen and ignites. This causes the chamber to momentarily inflate and the robot jumps. According to its creators, the combination of hard and flexible surfaces reduces how high the robot can hop, but it's more durable and can be partially steered using inflatable feet.
The team carried out tests on the robot in which it managed to jump 2.5 ft (0.75 m) high and travel six inches (0.15m). It was then dropped from a height of about four feet (1.2 m) 35 times, which it survived.

"We believe that bringing together soft and rigid materials will help create a new generation of fast, agile robots that are more robust and adaptable than their predecessors and can safely work side by side with humans," says Michael Tolley, assistant professor of mechanical engineering at UC San Diego and co-lead author of the paper.
The team's findings were published this month in Science.
The video below shows the soft jumping robot in action.
Source: UC San Diego
