






















































































The 2015 DARPA Robotics Challenge (DRC) has come to a close with South Korea's Team KAIST and its DRC-HUBO robot taking first prize in the US$3.5 million competition. The US Department of Defense's project to develop robots that can help responders in disaster areas saw KAIST beat 23 other teams from around the world in front of a crowd of 10,000 people.
On Saturday, as on the previous day, the action involved robots running a series of simultaneous heats where they negotiated a course while executing a series of eight tasks that simulated working in a disaster area.
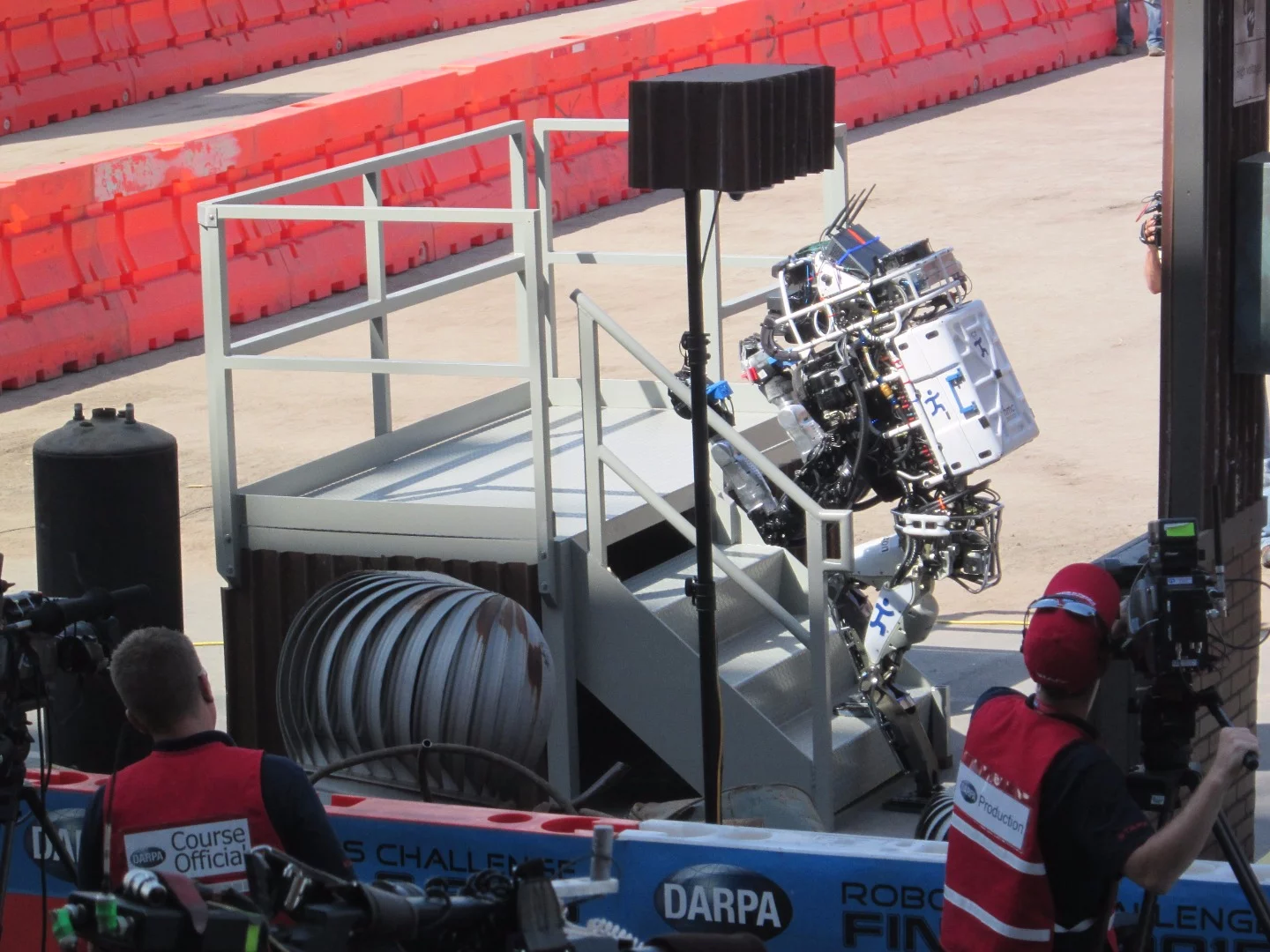
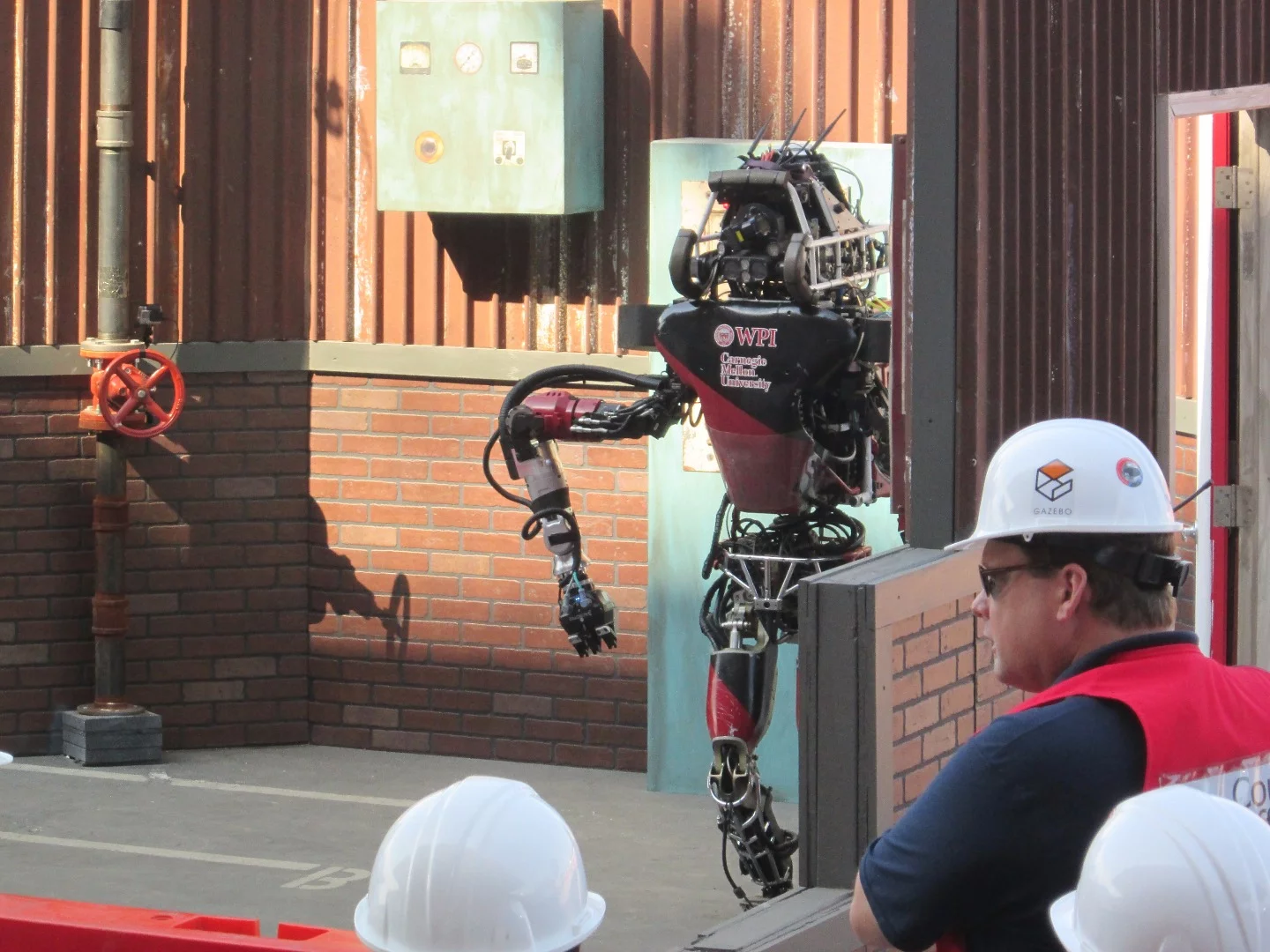
The tasks included driving a car, opening a door, operating a valve, and climbing a flight of stairs. To prevent the teams from pre-programming the robots to run the course, a surprise task was included, which on the final day of the two-day competition required the robots to remove an electrical plug from a socket and set it in a different socket.
Under intense Californian sunshine, the final day of the Challenge saw the competition upped a notch. Since damage to the robots that would put them out of the running was no longer a factor, the teams took more chances and robots fell more often.

Team Aist Nedo performed very well until the debris challenge, but just when the anime-styled robot HRP2+ stepped off the debris field for a point, it toppled onto cinder blocks, bursting open its torso and spewing components.
Another challenger that was initially doing well was Team Robotis' Thormang 2 ... until it fell unexpectedly and lost its head while tackling the surprise task. The robot had unplugged a wire and was sorting out how to plug it into the other socket, then quietly toppled over and hit its head on the wall, knocking it loose.
Falling over was a common occurrence with so many bipedal robots competing, and some were even sporting foam shoulder pads to protect their delicate arm mechanisms. Many times the falls would happen while the robots were navigating the debris field or climbing the stairs, but sometimes it would be an almost surreal event, like when Lockheed Team Trooper's Leo opened the door, paused, then calmly fell to the ground as if it had decided to have a quick nap.

It's interesting to note that the robots were required to stand up on their own or face a ten minute penalty, but for all the falling, only Tartan Rescue's Chimp managed to get back to its feet on the first day and none did so on the second.
Behind the wheel, team Vigir's eponymous robot did its own take on self-driving cars when it crashed its Polaris two-seater into a traffic barrier during the driving challenge.
Crash-test robots weren't the only spectacle either – between the heats, as the next robots were wheeled out and prepared, Boston Dynamic's robotic Cheetah gamboled on the track in an impressive and alarmingly lifelike display of robotic agility.

By the afternoon, teams that had finished the competition were doing post mortems back in the cavernous "garage," where many of them had been living 24 hours a day throughout the Challenge. Robots were in various states of repair. Some were back in tethers and taking steps under the watchful eye of engineers like patients in an accident ward, some were almost completely disassembled, some seemed abandoned by their makers, and others were posed as either educational or humorous exhibits.
The last few teams, the heavy hitters with high point scores, were still preparing with last minute test runs and system checks.
The general atmosphere was for the most part one of elation, given the huge task the teams faced to make it to the competition in the first place. This was a sentiment shared by both high-scoring teams and those whose robots never got further than the first task – this was a matter of building robots that were like nothing seen before, and just getting them to the point where they could attempt the DARPA course was a major achievement.
Meanwhile the competition wound down to its conclusion, which while not exactly suspenseful, was certainly appreciated by the large crowd.
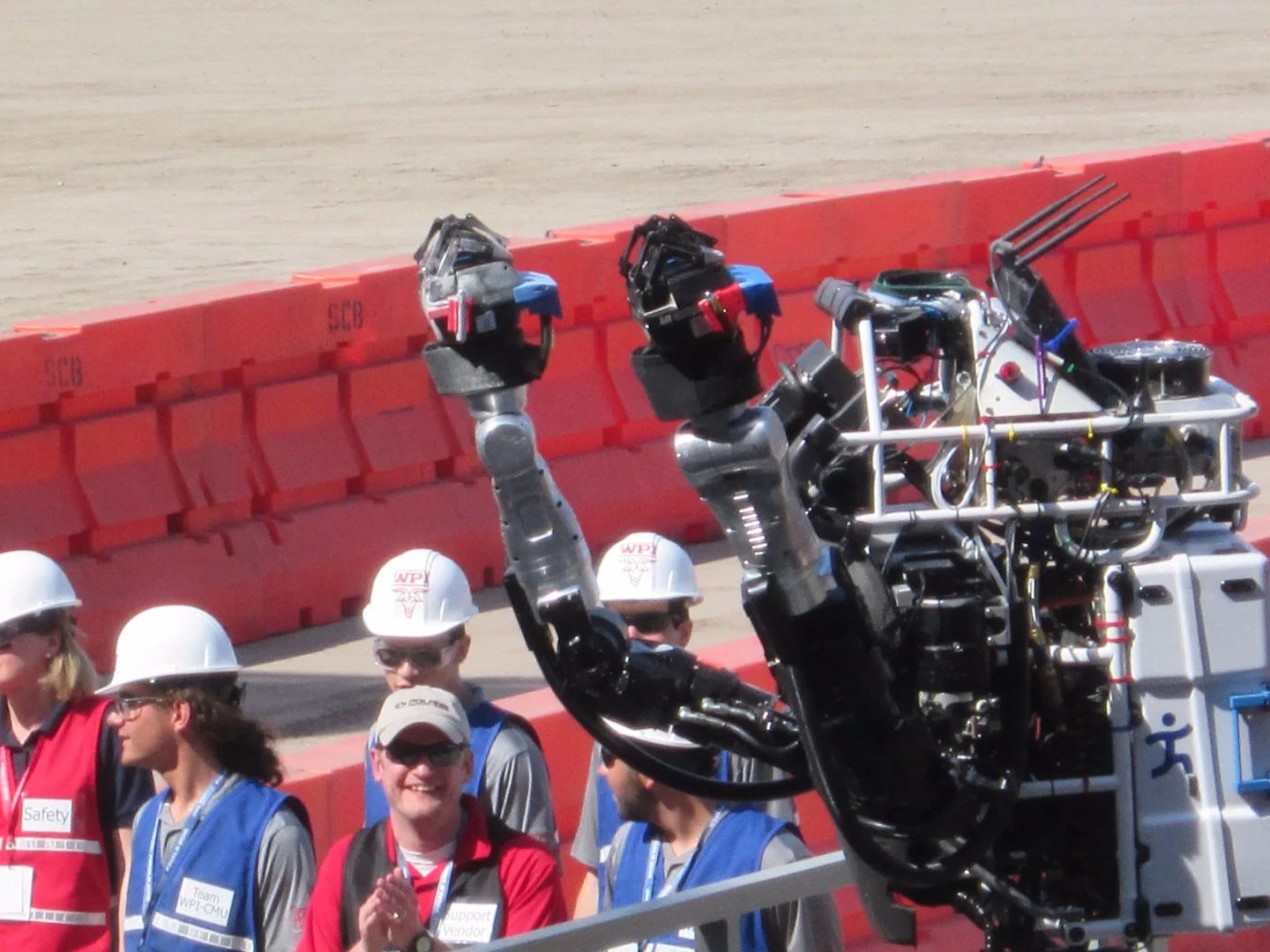
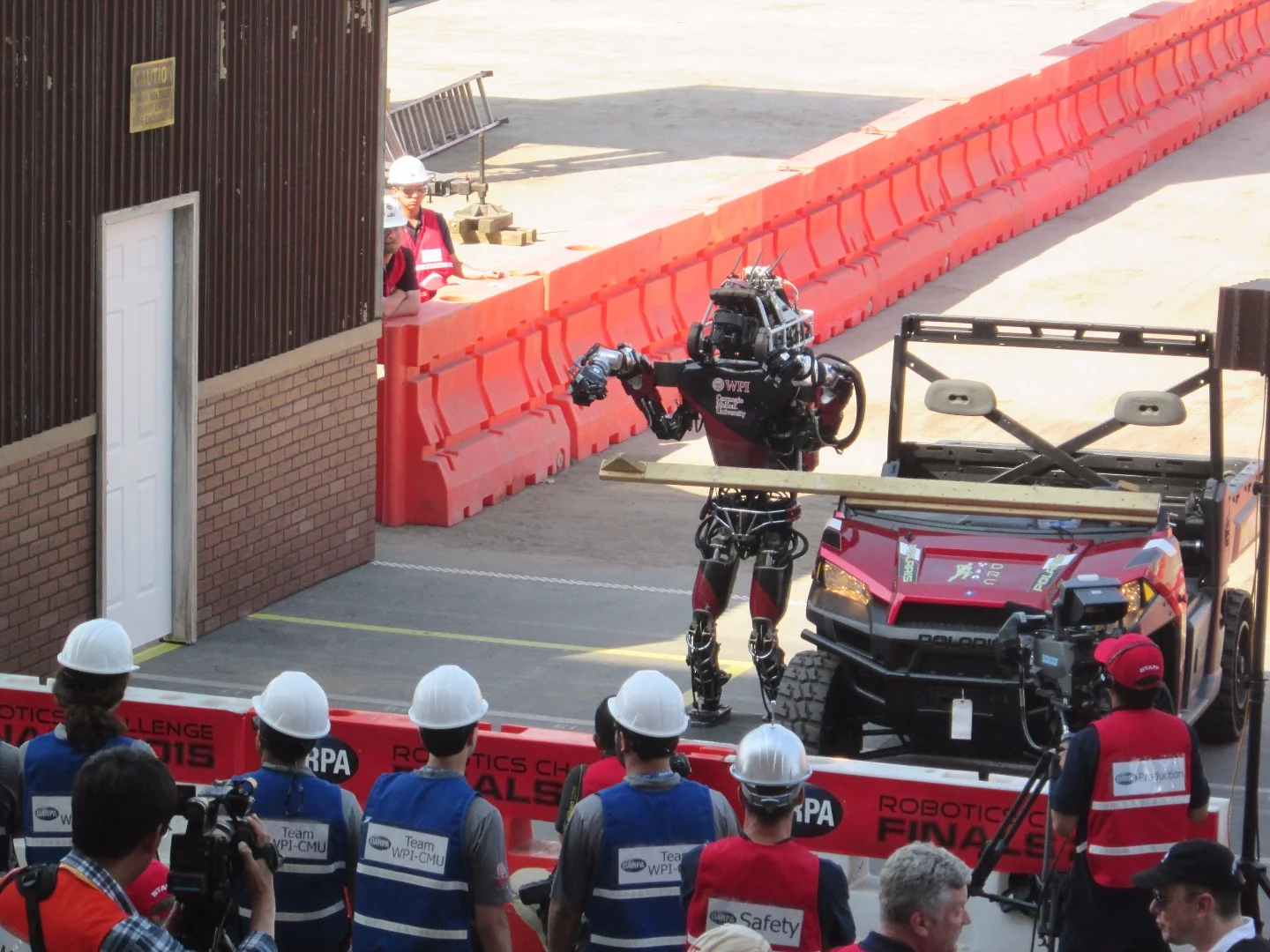
Team WPI-CMU's Warner was a crowd pleaser and looked like it would have a very good second day until the hole cutting task. The robot managed to pick up and activate two cordless drills only to drop both, forcing it to abandon the task.

This sort of difficulty is an illustration of the nature of the challenge. With the operators for each team confined to a building a quarter of a mile away and linked to their robot by a deliberately degraded communications system, they had to deal with significant time lags a very limited ability to control the machine.
Therefore, the robots had to be built with a high degree of autonomy, which the team engineers told us was the greatest part of the challenge. They had to build software that told the robot to carry out whole tasks and decide for itself how to do them. Precise teleoperation simply wasn't an option.
This was obvious when Team Robosimian took to the field. The robot, which resembles a cross between a spider and an ape, recovered neatly from a drill problem, but flubbed the surprise task when it lost its gap on the plug and backed away until it dropped it. Watched the plug slowly slide out of the robot’s open claw must have been agonizing for the operators when a simple command to close it would have saved the day.

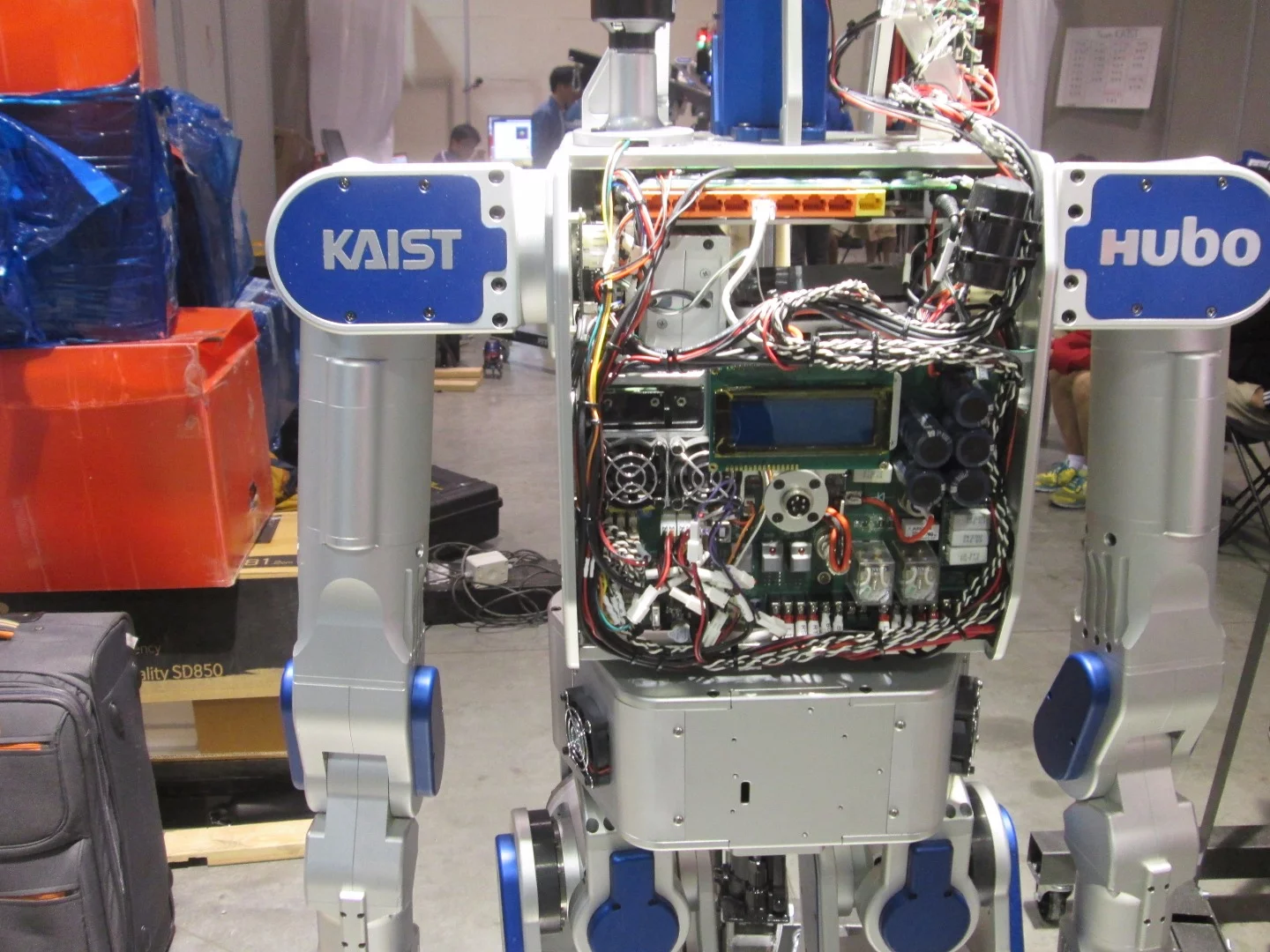
It was clear by the last round that first prize would go to Team KAIST's DRC-HUBO robot and that the likely challengers weren't going to deliver an upset.
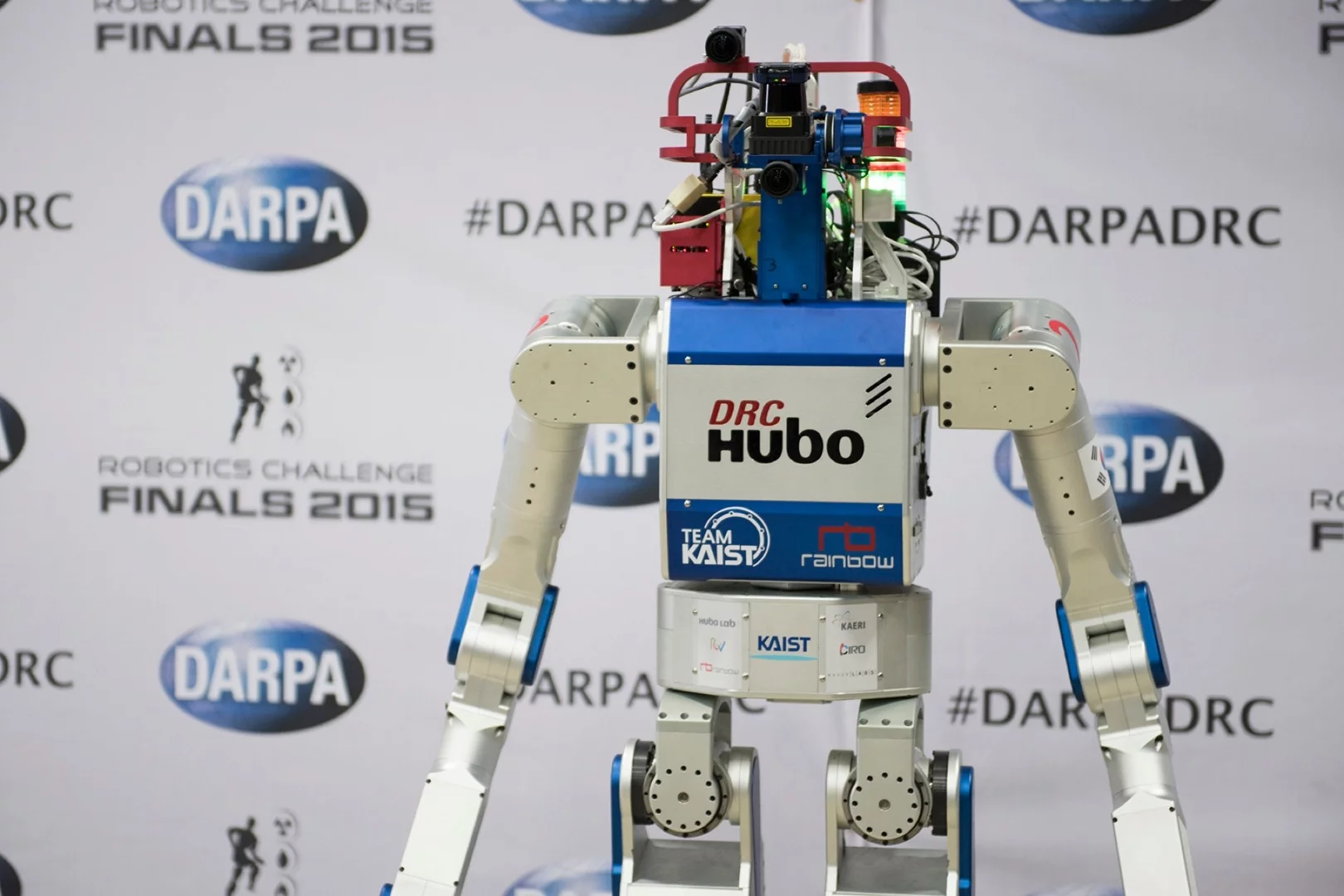
DRC-HUBO is the latest of the "HUmanoid roBOt (HUBO) robots developed by the Korean Institute for Science and Technology (KAIST) in collaboration with the Rainbow Company since 2002.
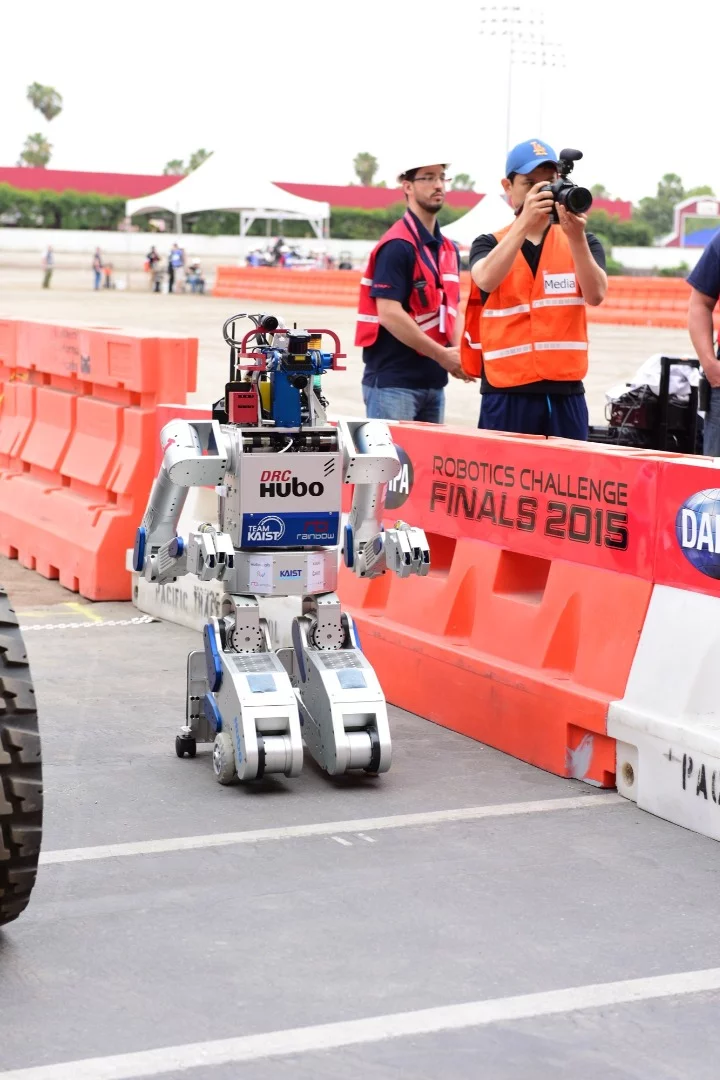
DRC-HUBO gains some of its advantage from its unique leg design. Instead of just walking, it can also transform into a rolling mode. When it kneels, the lower limbs turn into a stable platform with wheels on the ankles and knees to propel it at relatively high speed. With its modified humanoid hybrid design and lightweight aluminum construction, KAIST says that it improves on previous versions, is more powerful, has stronger hands, and is programed with a new walking algorithm. In addition, all motors are equipped with cooling fans.
The final scores for the 2015 DRC Final saw Team KAIST taking the US$2 million first prize with 8 points and a time of 44:28. Second was Team IHMC Robotics's Running Man robot with 8 points and a time of 50:26. Tartan Rescue's Chimp, which won the first day of competition, came third with 8 points and a time of 55:15.
The video below shows Team KAIST winning the 2015 DRC Final.
For more information, visit the DRC site.






