






James Bruton is a serial crazy-contraption inventor, from a Lego longboard to a self-balancing mecanum-wheeled "Screw bike." Now he's done it again with might be the most bizarre, big-red-balled self-balancing electric bike with five motors to power it.
This isn't Bruton's first self-balancing he's made, but this is the first time using equilibrium balls as wheels. They may look like yoga balls, but these are harder and retain their shape when weighted. They're the same kind of balls you've seen Cirque du Soleil performers using when doing their amazing tricks. Circus, indeed.
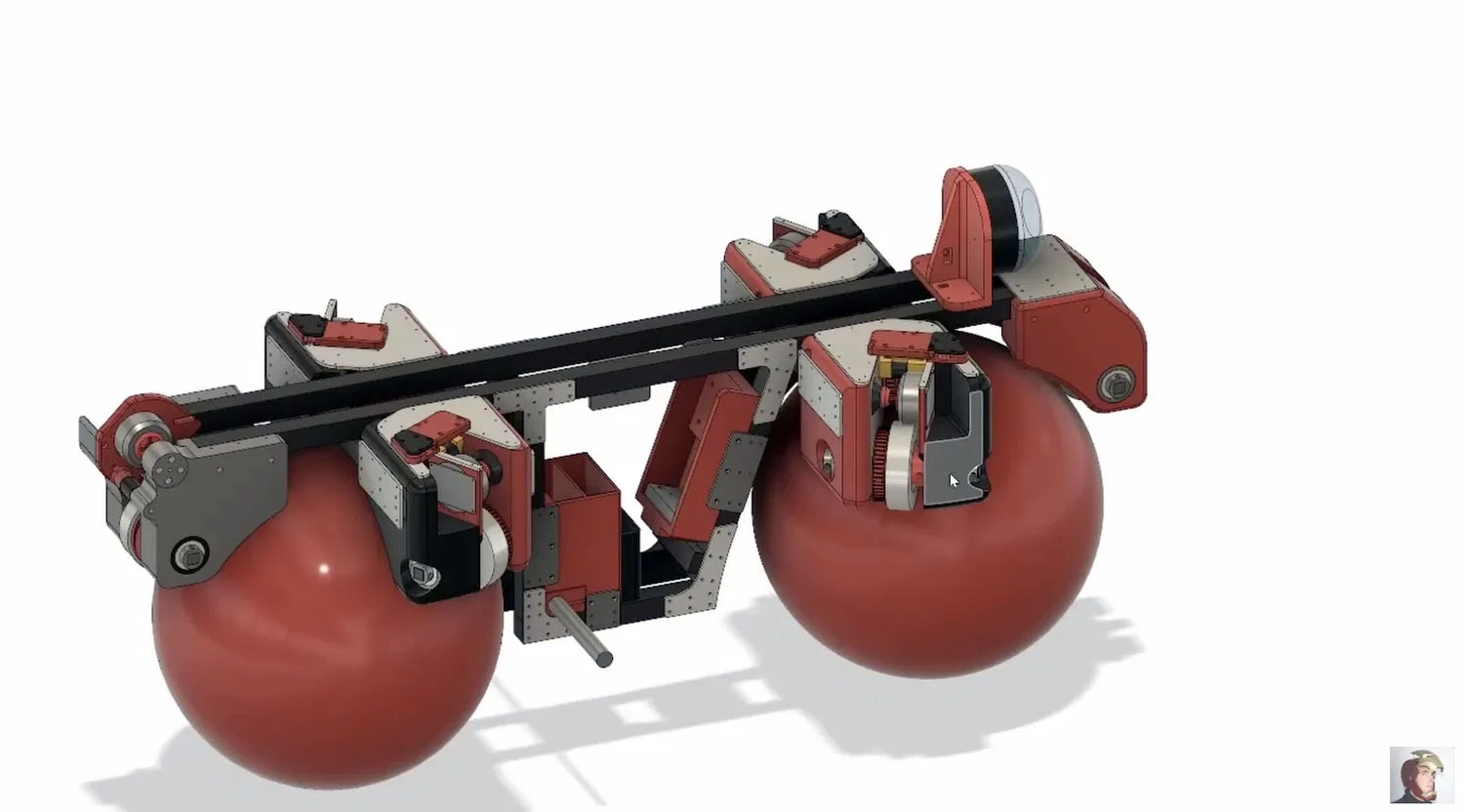
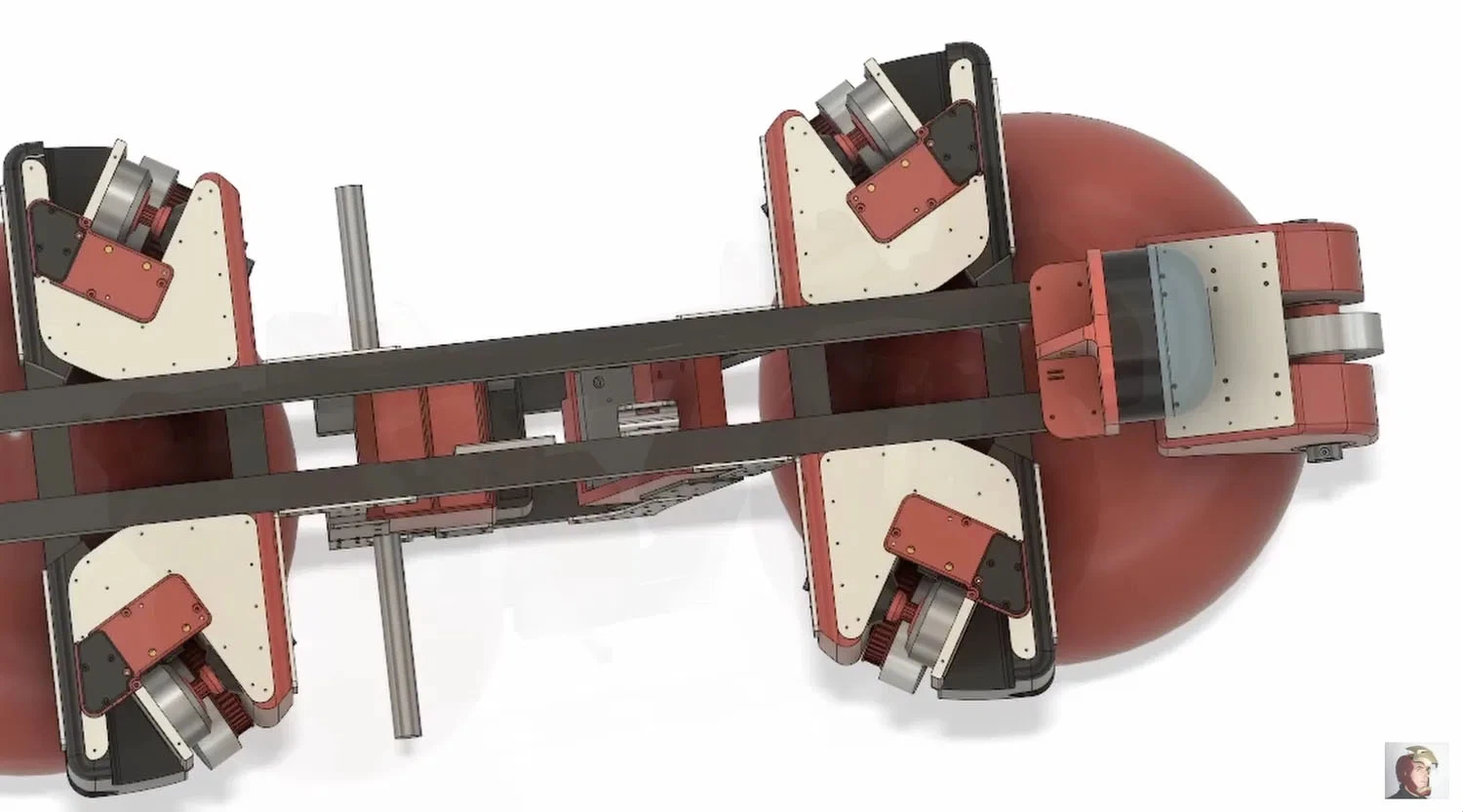
The bike chassis effectively sits atop the two balls while two electric motors in front and two in the rear are in communication with an Inertial Measurement Unit (IMU) – a device that uses accelerometers and gyroscopes to measure acceleration, orientation and angular velocity relative to the ground – making constant corrections to maintain an upright position in a sort of ABENICS gear-like setup. The third motor's only job, located in the rear, is to drive the bike forward or backward.
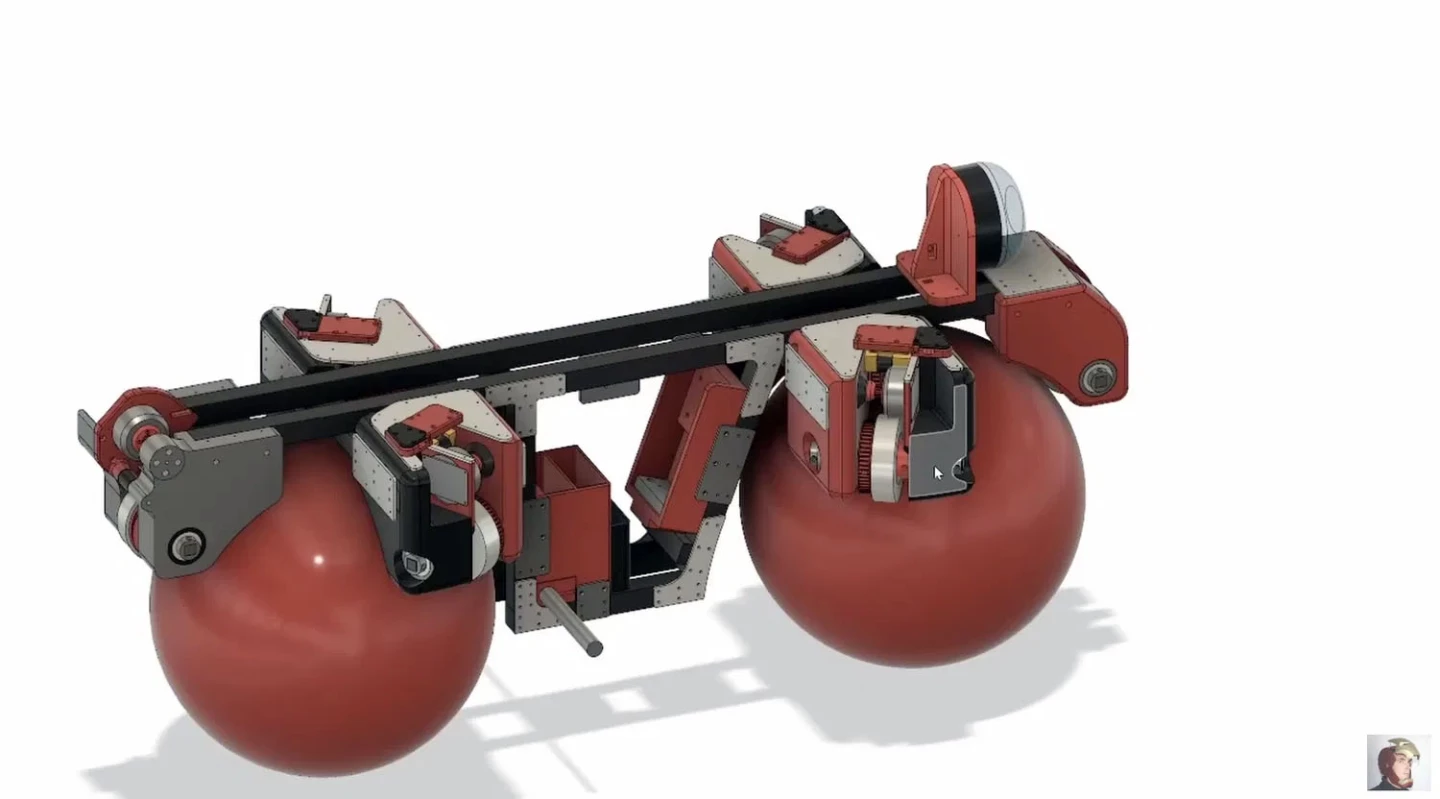
Each motor has a very minimal gear reduction to maintain the necessary amount of torque to the wheel that drives the ball to keep the whole thing upright, whether Bruton is sitting on it or not. And these aren't your standard wheels either, they're omni-wheels, capable of not only forward and reverse motion, but laterally, allowing his latest invention to travel in any direction on the ground, as unnatural as it may look.

His controls are ... unique. Much like a standard motorcycle throttle, the right-hand controls forward .. but also reverse (roll forward to go forward, roll reverse to go in reverse), while a twist of the left-hand controls left/right yaw. I could see this end up being disastrous in a panic or hardware failure moment. Interestingly, he can also control trim, much like an airplane, and gain. With small tweaks to each, Bruton can affect the bike differently in how it leans or pivots based on the controls. It can turn like a hovercraft, or it can turn like a motorcycle. It's all rather clever, really.
The entire system is powered with six 6S lithium polymer batteries – the same kind of battery you'd find in an RC car – but wired in series pairs then paralleled to make it a 50v system. If Bruton were to figure out a way to harness the amount of static electricity two giant red "balloons" create, he might just never need to charge it ever again.

Not just an inventor of cool gadgets, Bruton is also an accomplished coder. He wrote all the software himself in Arduino, which is essentially C++, but geared towards microcontroller programming.
There isn't much to the omnidirectional bike build that you can find off-the-shelf. Most of its components are custom 3D prints he designed and printed himself, while other metal structural parts are designed by Bruton but cut by a 3rd party. Either way, he puts all of his CAD designs and custom software out into the ether for anyone else brave enough to build one for themselves.

If you're not into doom-scrolling and like to nerd out on in-depth content like I do, Bruton is an interesting YouTube personality who gives everyone a step-by-step glimpse into his creations. Maybe most notable was his Ironman "Hulkbuster" suit, reminiscent of Fallout Power Armor ... Or maybe his working Star Wars AT-AT that was so big he could ride on it ... Or ...
Source: YouTube/XRobot


