

While we hear a great deal about the huge patches of garbage that are floating on the world's oceans, there's even more trash lying on the seabed. The European Union-funded SeaClear project aims to gather much of it up, using autonomous robots.
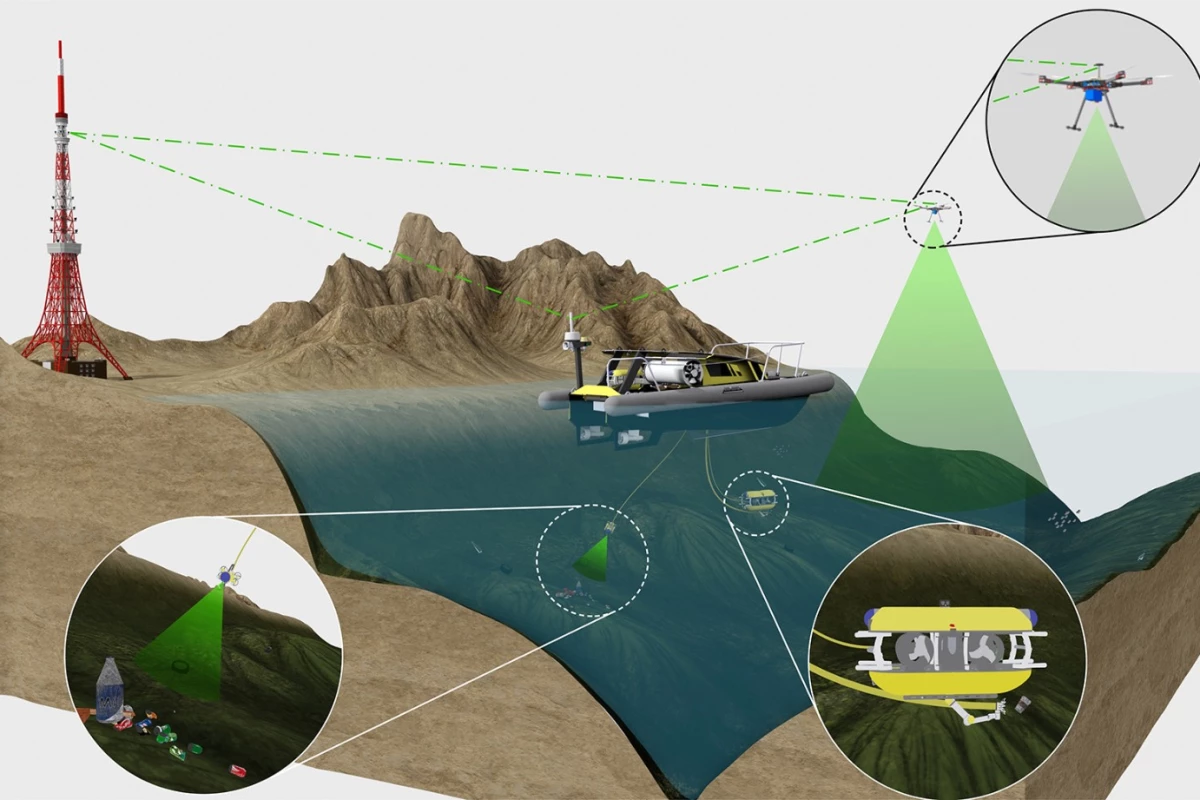
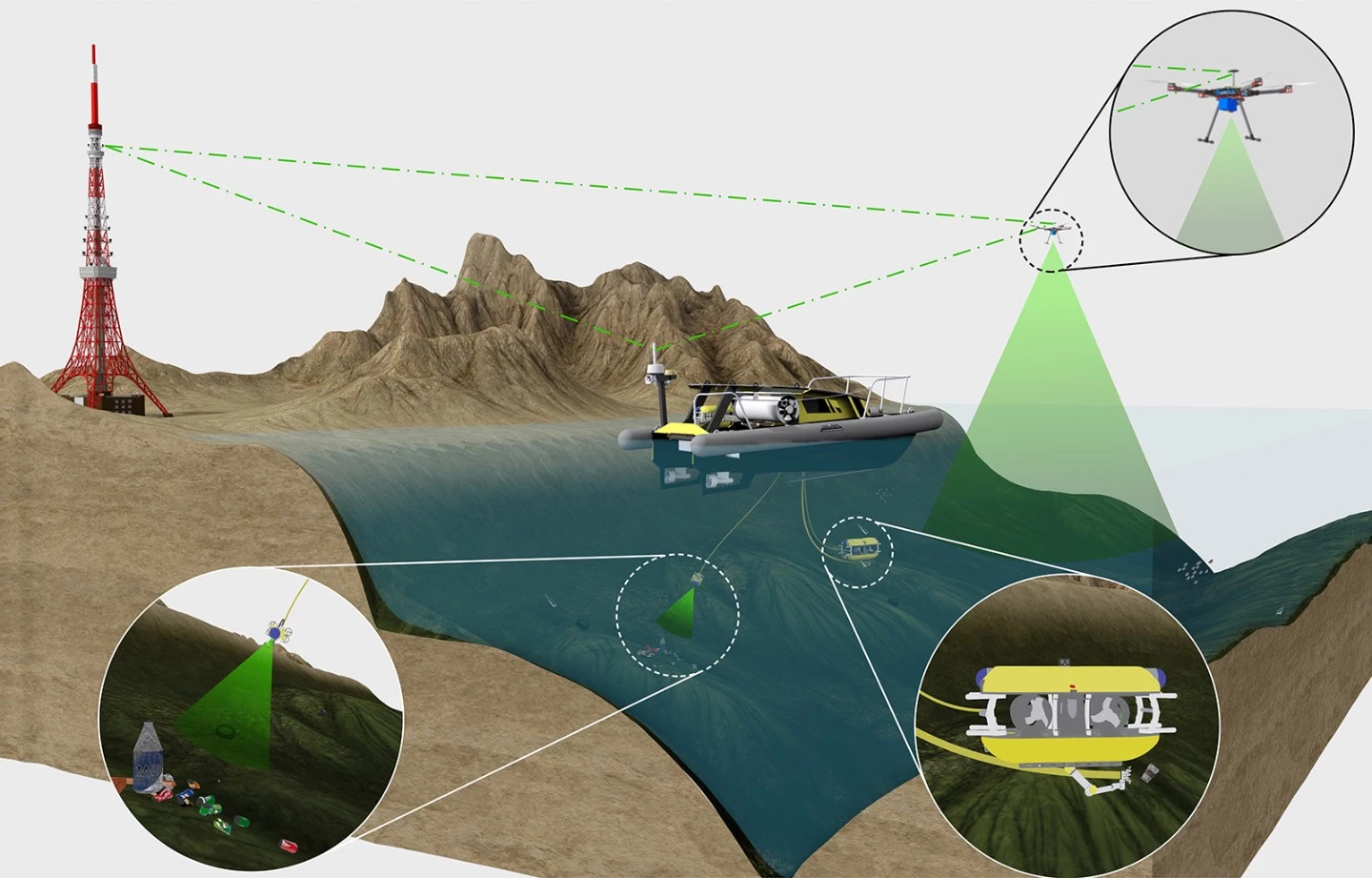
Plans call for the basic system to consist of four robotic vehicles: an aerial drone, two underwater remote-operated vehicles (ROVs), and an unmanned surface vessel that will serve as a mothership. Via umbilical cables, the latter will supply power to the two ROVs, plus it will use an onboard computer to process their transmitted data.
The system will be deployed mainly in coastal areas, as that's where the majority of the garbage enters the ocean from rivers.
Initially, the drone and one of the ROVs will be used to spot trash, on the surface and in the water column respectively – if garbage is present in both of those areas, then it's likely abundant on the seabed in that location too. With that in mind, the second ROV will then move in and travel along the seabed, using a custom-designed gripper and suction device to gather the refuse. This will be carried back to the surface vessel, and disposed of in a central bin.

Artificial intelligence-based algorithms will be used to help the drone and the first ROV to differentiate between garbage and marine animals, etc, plus such algorithms will let the second ROV tell the difference between garbage and coral or other natural structures.
A prototype version of SeaClear was tested this spring at depths of 20 to 30 meters (66 to 98 ft), in the Port of Hamburg and along the coast of Dubrovnik, Croatia. Those locations were chosen because they are quite different from one another – the port is busy, industrial and has fairly silty water, whereas the Croatian coast is much calmer, clear-watered and tourist-oriented.
The consortium partners include Germany's Fraunhofer Center for Maritime Logistics and Services; the Technical Universities of Munich, Delft, Dubrovnik and Cluj-Napoca; SubSea Tech Marseille; the Hamburg Port Authority; and the DUNEA Regional Development Agency Dubrovnik.
Sources: SeaClear, Fraunhofer


