
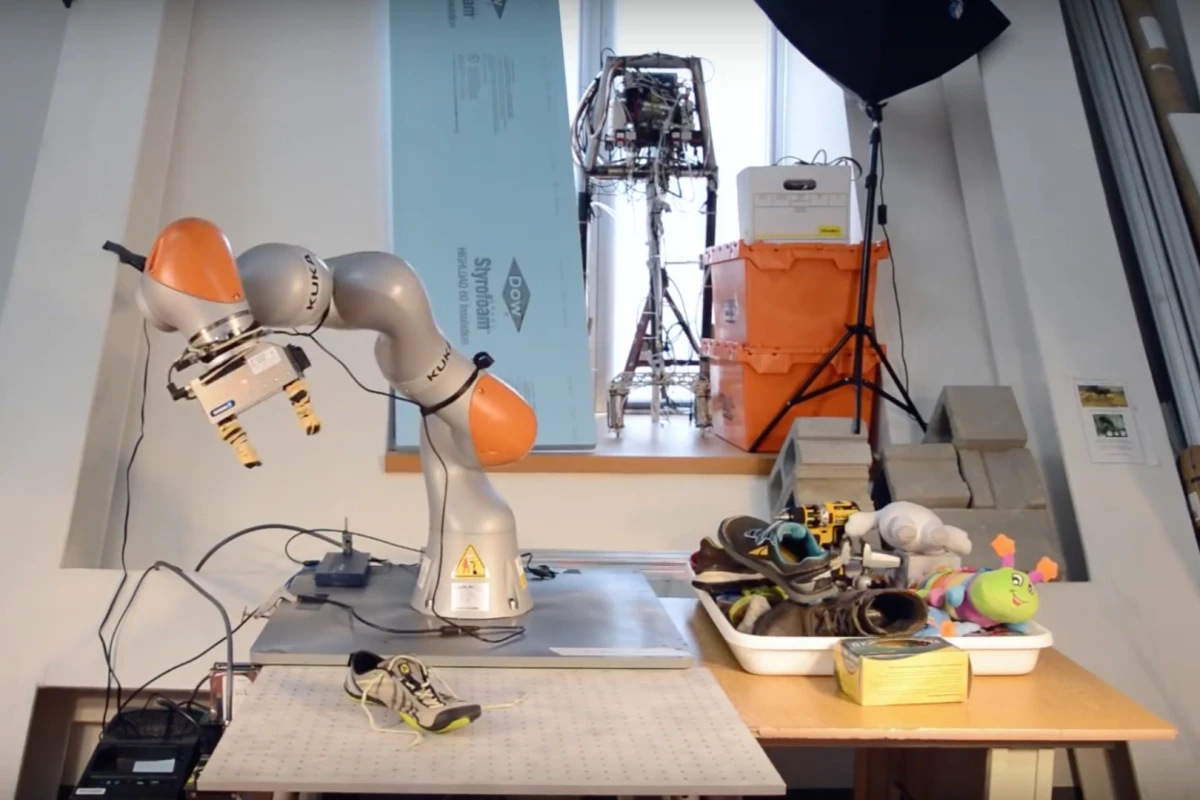
When we think of robots manipulating objects, we tend to think of endless banks of robot arms in some high-tech assembly line, dancing their mechanical dance in perfect synchronization. They grab an object, turn it round a bit, and put it down again, before repeating the action with an identical object time and again. But what if a robot could look at any item, and decide how best to pick it up, and perform tasks with it, all by itself? That's the aim of DON – a new neural network and robotic hand at MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL).
DON doesn't need to be trained by a human master in order to learn what objects are what. DON stands for Dense Object Nets, and is a neural net and visual system which sees an object as an array of points. It's a technique which CSAIL says not only allows the robot to better visualize an object, but also to pick out a particular one from a selection of similar-looking items. The researchers compare the technology to the techniques photography apps use to stitch photos together into a larger panorama.
With the array complete, you can identify a particular point for DON, and it'll pick up the object by that part – and, unlike other visual systems, it can do this regardless of the object's orientation. It can then apply that knowledge to pick up similar objects by the equivalent part. It can even tell left from right when items are symmetrical.
"Many approaches to manipulation can't identify specific parts of an object across the many orientations that object may encounter," research author Lucas Manuelli says in an MIT press release. "For example, existing algorithms would be unable to grasp a mug by its handle, especially if the mug could be in multiple orientations, like upright, or on its side."
Impressively, presented with a bin full of baseball caps, DON is able to identify and pick up a particular one without any prior knowledge of what a baseball cap is. All it needs to do is take some pictures from varying angles first.
The researchers think the technology could be useful in industrial settings, and particularly in warehouses for picking out merchandise to be shipped to customers. But they also think DON could prove useful in the home, whether tidying up general clutter, or performing specific tasks like putting away the dishes.
They hope that with further development, DON will be able to perform more tasks with objects it's picked up, such as cleaning an item of furniture.
The research will be presented at this year's Conference on Robot Learning, which is happening in Zürich, Switzerland between October 29 and 31.
You can see a great video of DON in action below.
Source: MIT





