
The expansive webs of pipeline that sprawl beneath many of the world's urban areas serve as a literal lifeline for thirsty inhabitants, but we don't often think about how much is going to waste. According to MIT, an average of 20 percent of the water flowing through today's distribution systems is lost to holes along its journey, so researchers are developing a small robot that can be deposited through a fire hydrant to hunt out the leaks.
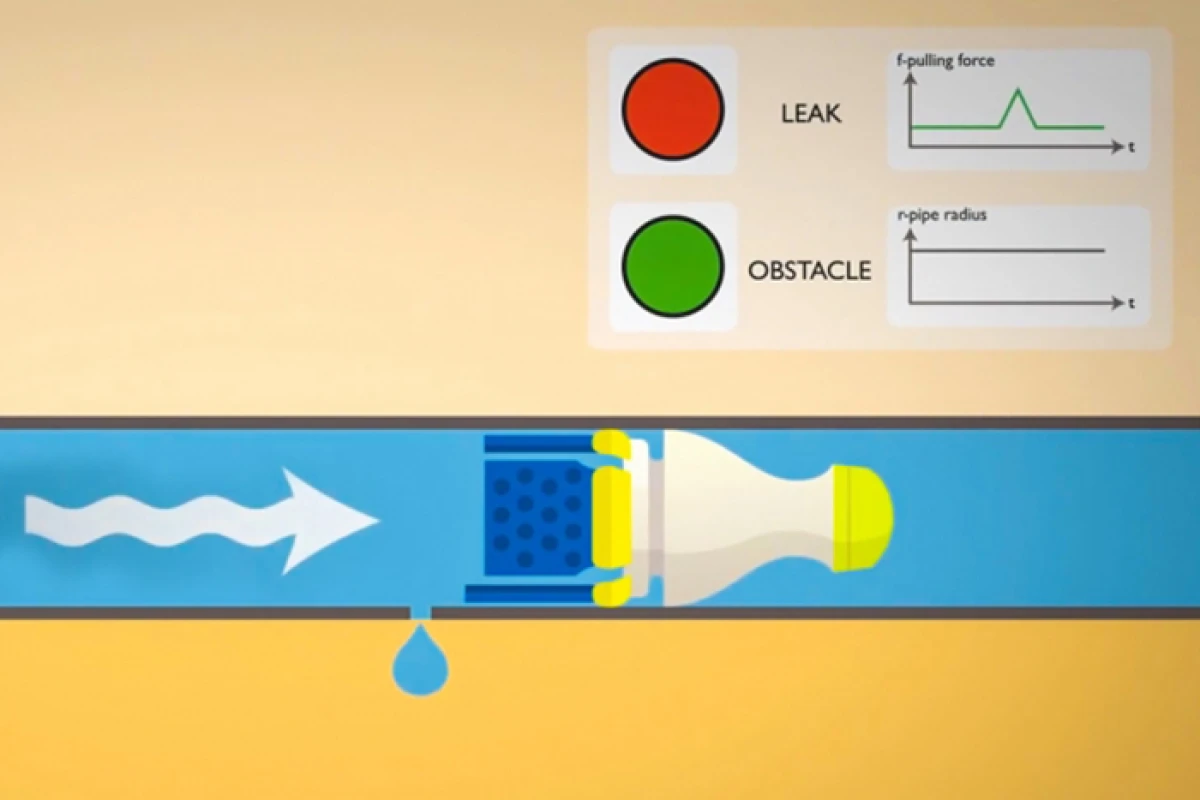
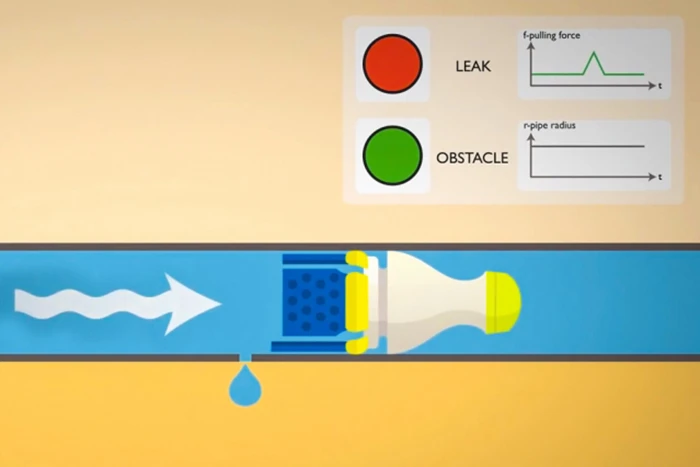
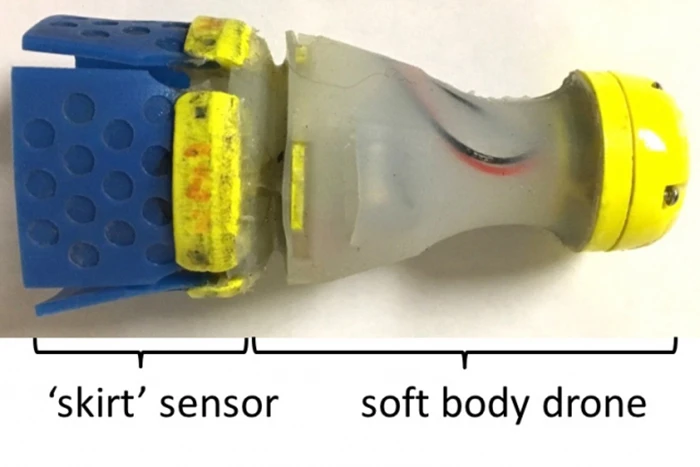
The robot is called PipeGuard and resembles a large shuttlecock. Attached to the robot's rubber body, where the feathers would be, is a soft rubber skirt that expands to fill the diameter of a pipe. This then detects variations in pressure caused by a leak, by continually sensing the degree of pull at its edges.
This robot can be inserted into the pipe system through any fire hydrant, where the flow of water carries it along its merry way as it logs its position in the pipe and detects small variations in pressure, thanks to its sensitive rubber skirt. Then at the end of its journey, it can be retrieved with a net through another fire hydrant and its data can be retrieved.
The team carried out field tests in Saudi Arabia earlier this yet, using a mile-long (1.6 km) piece of two-inch thick (5 cm) rusty pipe. The researchers created an artificial leak for the robot to find as its made its way through bends, T-joints and connections. The team reports that the robot was able to detect the leak successfully, and was able to tell it apart from false alarms resulting from changes in the pipe size, orientation or other pressure variations.
"We put the robot in from one joint, and took it out from the other," says MIT graduate student You Wu, who helped developed the robot. "We tried it 14 times over three days, and it completed the inspection every time. What's more, it found a leak that was about one gallon per minute, which is one-tenth the minimum size that conventional detection methods can find on average, and a third as large as those systems can find under even the best of conditions."
We have seen a number of robotic solutions to this problem of leaky pipes over the years. One example is a Japanese sinuous robot that livestreams video from inside, while another articulated version uses propellors to move through the pipes. But MIT's solution does appear to have a very useful advantage (further to its passive design), in that its rubber skirt has the ability to expand to pipes of various sizes, like an umbrella.
This would involve developing a new collapsible version, so the robot can easily transition to wider and narrower settings. This could prove particularly useful in Boston, the team notes, where the water distribution system is made up of a mix of pipes measuring six, eight and 12 inches wide (15, 20 and 30 cm).
But first, the team will carry out further field tests in Mexico this year, where PipeGuard will navigate 12-inch concrete water pipes beneath Monterrey. This city loses an estimated 40 percent of its water supply to leaks each year, according to MIT, which amounts to around US$80 million in lost revenue.
Further down the track, the team says the robot could be adapted to service gas pipes as well, and even be improved upon to not just detect small leaks, but carry out repairs on the spot.
Source: MIT





