


While there are a number of optical systems that provide robotic hands with a sense of touch, most of those systems are flat, so they're confined to the fingertips. A new MIT system, however, works along the entire length of each finger.
Known as GelSight Svelte, the setup builds upon MIT's existing GelSight technology.
In the latter system, a slab of clear silicone is coated on one side with a layer of opaque metallic paint. When the painted side is pressed against a surface, it deforms to the shape of that surface. Looking through the opposite, unpainted side of the silicone, one can see the minute contours of the surface, pressing up into the paint.
Using a camera and computer algorithms, the system is able to turn those contours into 3D images that capture details less than one micrometer in depth and approximately two micrometers in width. Those visual details are converted into the equivalent of pressure points that would be felt by our nerves.
MIT initially incorporated a GelSight sensor into one finger pad of a robotic gripper, allowing the device to "feel" cables that it was grasping. In the subsequent GelSight EndoFlex hand, which could identify three-dimensional objects by feeling their shape, two of the sensors were built into each of the three fingers (for a total of six for the whole hand).
GelSight Svelte likewise extends the sensing capabilities beyond the finger pads, but in a much sleeker and more efficient style. It has already been integrated into a three-fingered robotic hand.
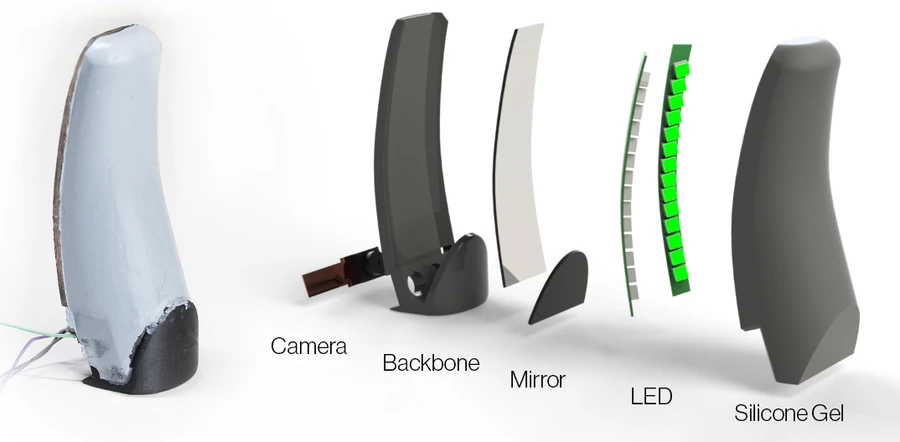
Each finger of that hand contains just a single internal camera, located at the base of the digit. There are also two rows of internal LEDs (one greed, one red) running along the length of the finger, plus there are two mirrors – one long curved mirror runs the length of the finger, and a shorter flat mirror sits angled below the camera.
By looking down into the flat mirror, the camera can see the reflection of the entire curved mirror, thus seeing all of the finger-surface deformations that are being reflected by it. What's more, by analyzing the green and red light saturation of each deformation, it's possible to determine the amount of pressure that the underlying surface is applying to the silicone.
Additionally, GelSight Svelte continuously monitors the curvature of each finger via sensors in a flexible backbone that runs along the back of the digit. The system knows that the more the finger curves, the greater the pressure it's placing on the object that it's holding.
"Because our new sensor is human-finger-shaped, we can use it to do different types of grasps for different tasks, instead of using pinch grasps for everything," said Alan (Jialiang) Zhao, a mechanical engineering graduate student and lead author of a paper on the research. "There’s only so much you can do with a parallel jaw gripper. Our sensor really opens up some new possibilities on different manipulation tasks we could do with robots."
You can see the hand in action, in the video below.
Source: MIT


