



Exoskeletons have been helping paraplegic patients to walk for years, but the latest development from KAIST is a little different. The WalkON Suit F1 can amble over to a patient seated in a wheelchair, wrap itself around the legs and body, and get the user up and walking.
Professor Kyoung-Chul Kong from KAIST's Department of Mechanical Engineering has been working on exoskeletons for around a decade, with the first WalkON Suit being revealed in 2016. By 2020, the research team had increased the walking speed to 3.2 km/h (1.98 mph) and entered the fourth-generation prototype into the Cybathlon in Switzerland.
This "cyborg Olympics" was launched in 2016 by ETH Zurich to drive advances in assistive technologies. The first event was held near Zurich and attracted teams from 25 nations, and saw 66 "pilots" compete for the spotlight. Four years later, pilots wearing KAIST's WalkON Suit 4.0 placed first and third in the Exoskeleton Race event. The third Cybathlon took place this past weekend, with Professor Kong's team fielding the latest development from the WalkON engineers.
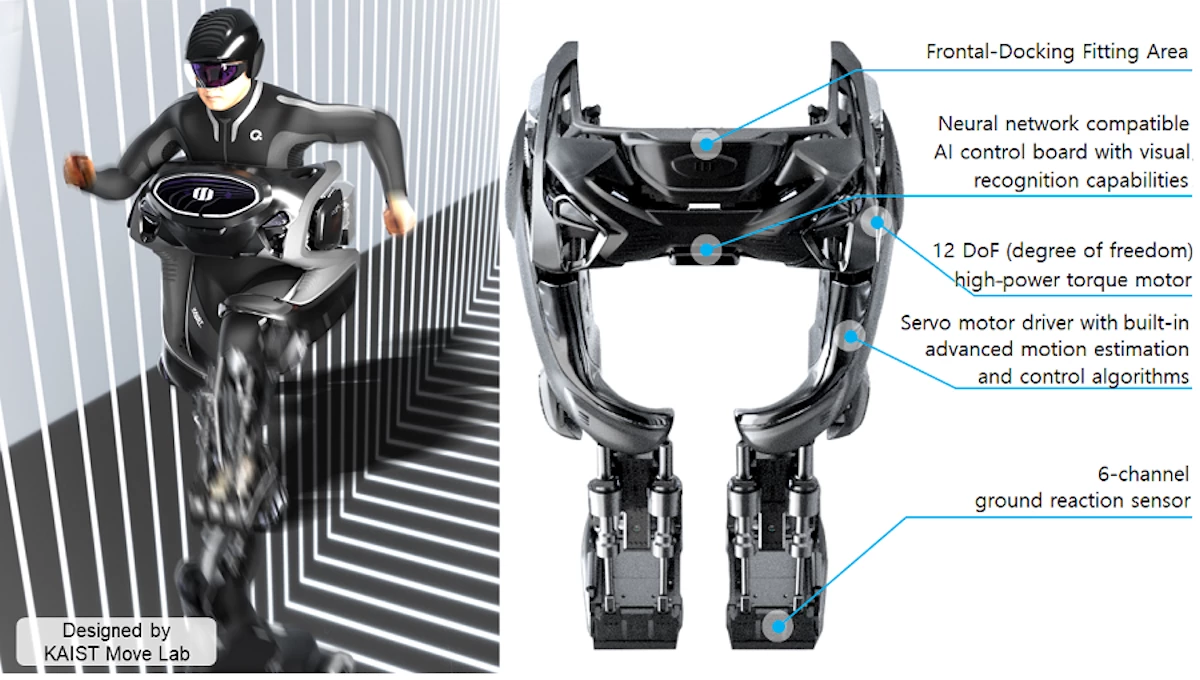
Where other exoskeletons require helpers to raise paralyzed patients out of their wheelchairs before strapping them to the assistive devices, the WalkON Suit F1 can "walk on its own like a humanoid robot" and approach the patient. It features a front-docking system that means the paraplegic user can remain seated as the exoskeleton installs itself around the body and legs of the patient.
There's a system in place "that actively controls the center of its weight against the pull of gravity" to prevent it toppling over as the user is assisted into a standing position. Overall balance has been tweaked to enable the use of both hands while upright, along with short bursts without needing a supporting cane. The powerful motors and control algorithms have been significantly improved compared to previous versions, and the setup even sports vision recognition for obstacle detection.

Paraplegic Seunghwan Kim – the engineering lab's staff researcher – served as pilot for the 2024 Cybathlon's exoskeleton competition. Though some teams made the trip to Switzerland to compete, Professor Kong's team elected to live broadcast its attempt from special facilities of the company he set up in 2017 to commercialize wearable robots, Angel Robotics.
Teams were challenged with completing various missions within a tight time slot, including "moving by sidesteps between narrow chairs, moving boxes, walking freely unassisted by crutches, passing through a narrow door and closing it behind, and working on food preparation in the kitchen."

It took Kim and the WalkON Suit F1 6 minutes and 41 seconds to complete all missions, and secure first place. Second place went to a Swiss team and third to Thai engineers, though neither of these managed to finish all tasks within the allotted 10 minutes.
"The various know-how and core technologies accumulated while preparing for this competition is to contribute to further development and propagation of wearable robots, provoking imagination to draw on the future of wearable robots and on how it may change our daily lives," reads a KAIST press release detailing the win.
Source: KAIST


