
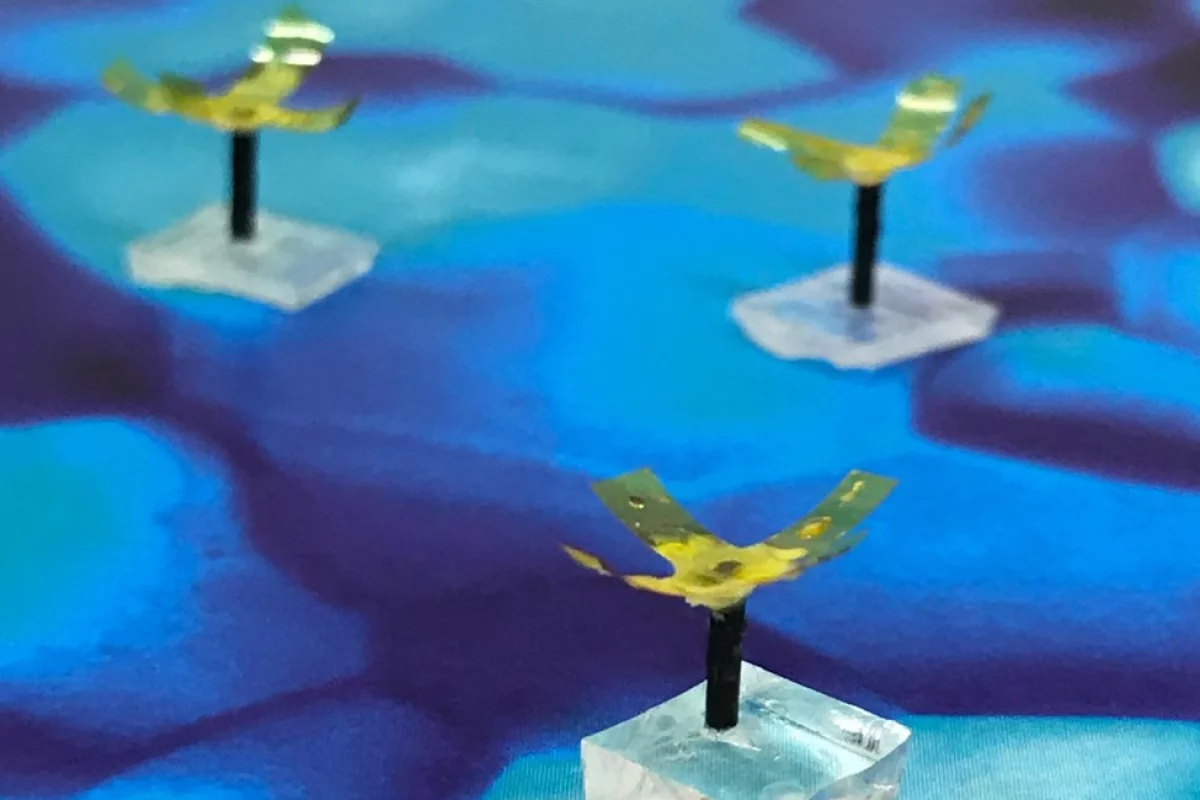
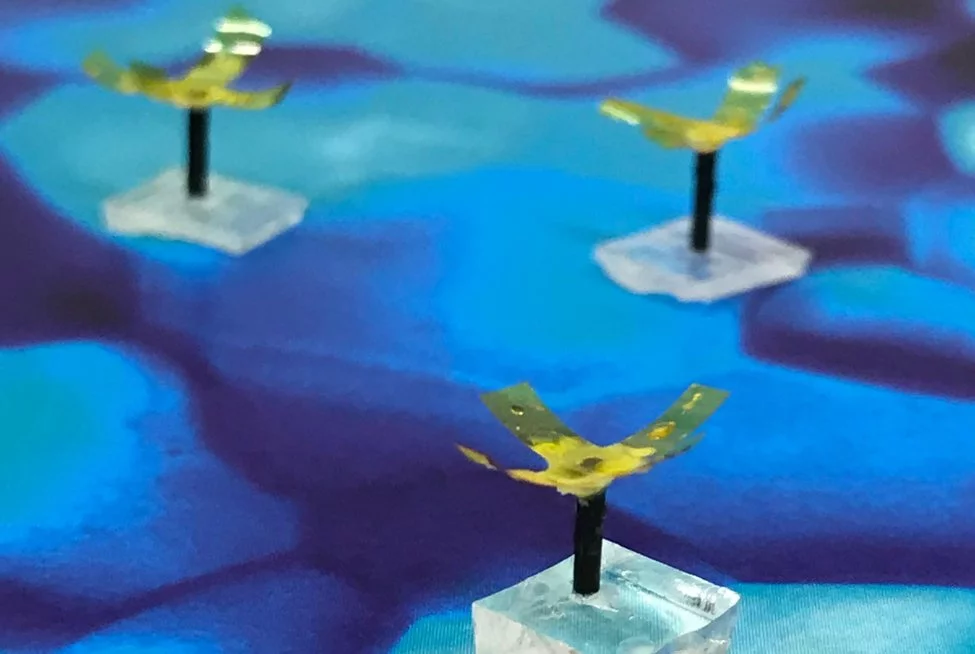
Researchers at Eindhoven University of Technology in the Netherlands have drawn inspiration from a tiny tentacled marine creature to produce a centimeter-scale robot that is powered by magnets and light. With the ability to grab and release objects underwater, the team imagines a range of applications for its new machine including collecting contaminants with its tentacles or even capturing cells as a tool in biomedicine.
The wireless aquatic robot is inspired by coral polyps, small and soft organisms that band together in huge numbers and eventually form coral reefs. These little critters feature a central stem that makes specific movements to generate small currents, which in turn attract food particles for their tentacles to grab a hold of. In this, the researchers saw some interesting possibilities.
“I was inspired by the motion of these coral polyps, especially their ability to interact with the environment through self-made currents,” explains study author Marina Pilz Da Cunha.
Pilz Da Cunha and her team went about recreating this by starting with a stem that moves under the influence of a rotating magnet underneath, enabling it to generate currents in the surrounding water. This has the effect of attracting contaminant particles in the water, at which point the light-activated tentacles take over.
These are crafted from a photomechanical polymer material that respond to different wavelengths of light. When subjected to UV light, the tentacles respond with a “grabbing” motion, while blue light causes them to “release.” Altogether, this makes for a soft robot measuring a centimeter along each side that can grab small objects underwater though magnets and light.
“Combining two different stimuli is rare since it requires delicate material preparation and assembly, but it is interesting for creating untethered robots because it allows for complex shape changes and tasks to be performed," explains Pilz Da Cunha.
In one experiment, the team demonstrated the capabilities of its polyp-inspired robot by having it snare droplets of oil from within a sample of water. As an additional layer of functionality, the robot can also be made maintain a new shape, for example the “grabbing” state, until it is exposed to the correct light.
"That helps to control the gripper arm; once something has been captured, the robot can keep holding it until it is addressed by light once again to release it," says Pilz Da Cunha.
For its next steps, the team is working to produce a fleet of its small robots that could potentially work together to transport particles, with one passing them onto the next. Further down the track, it imagines putting them to work capturing and transporting specific cells as part of advanced diagnostics devices.
You can see the robot do its thing in the video below, while the research was published in the journal Proceedings of the National Academy of Sciences.


