


Water striders are fascinating to watch, as they scoot across the water while supported by surface tension. Scientists have now built a tiny robotic version of the insect, which utilizes a record-breaking actuator to get a move on.
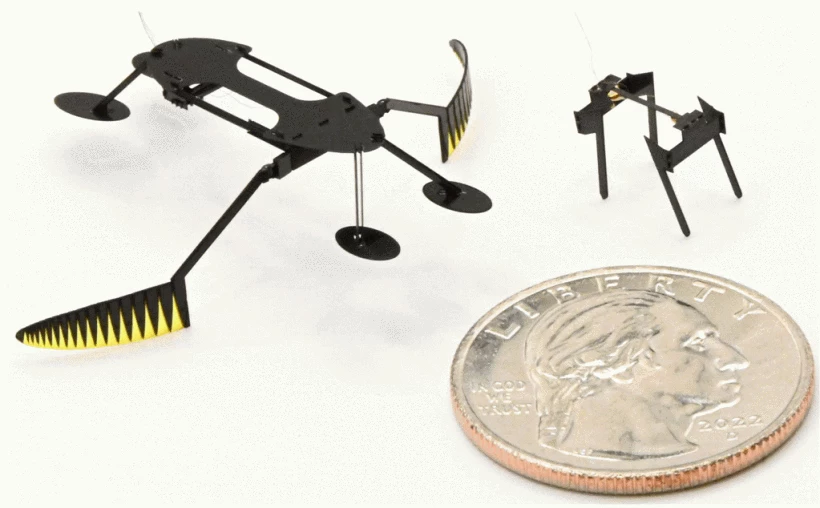
The WaterStrider robot was created at Washington State University, by a team led by Assoc. Prof. Néstor O. Pérez-Arancibia and engineering PhD student Conor Trygstad. The researchers also built a smaller, simpler water-bug-inspired robot called the MiniBug.
Certainly the more intriguing of the two, the WaterStrider bot measures just 22 mm long (the MiniBug is 8.5 mm) and tips the scales at a mere 56 milligrams. Its mostly carbon fiber body utilizes four disc-like feet to maintain surface tension, keeping it from sinking.
The really interesting part of the robot, however, is the "shape memory actuator" that moves its two arms/fins. At 7 mm in length, it's reportedly the smallest device of its kind ever made.
The actuator incorporates two minuscule wires made of a nickel-titanium alloy that contracts when heated, but relaxes back to a longer default state when cool. When exposed to an electrical current, the wires heat up and thus contract. When that current ceases, the wires cool and revert to their "memorized" longer state.
Therefore, by applying a pulsating electrical current, it's possible to make the wires rapidly switch back and forth between their two states, flapping the connected arms in the process. In this fashion, the WaterStrider is able to flap its arms at a rate of up to 40 times per second, "paddling" itself across the water's surface at a speed of about 6 mm per second.
Utilized in a different configuration, the actuator is additionally able to lift 155 times its own weight.
Pérez-Arancibia, Trygstad and colleagues are now working on incorporating the power supply into the robot, plus they're hoping to develop other insect-inspired bots that can move both across the water's surface and beneath it.
The robots could one day be utilized in applications such as artificial pollination, search and rescue, and environmental monitoring, while the actuator itself could additionally find use in tasks like micro-fabrication and robotic-assisted surgery.
A paper on the research was recently published in Proceedings of the IEEE Robotics and Automation Society’s International Conference on Intelligent Robots and Systems.
And no, this isn't the first robotic water strider we've seen. Previous examples have moved by manipulating surface tension and via a heat-sensitive film.
Source: Washington State University


