







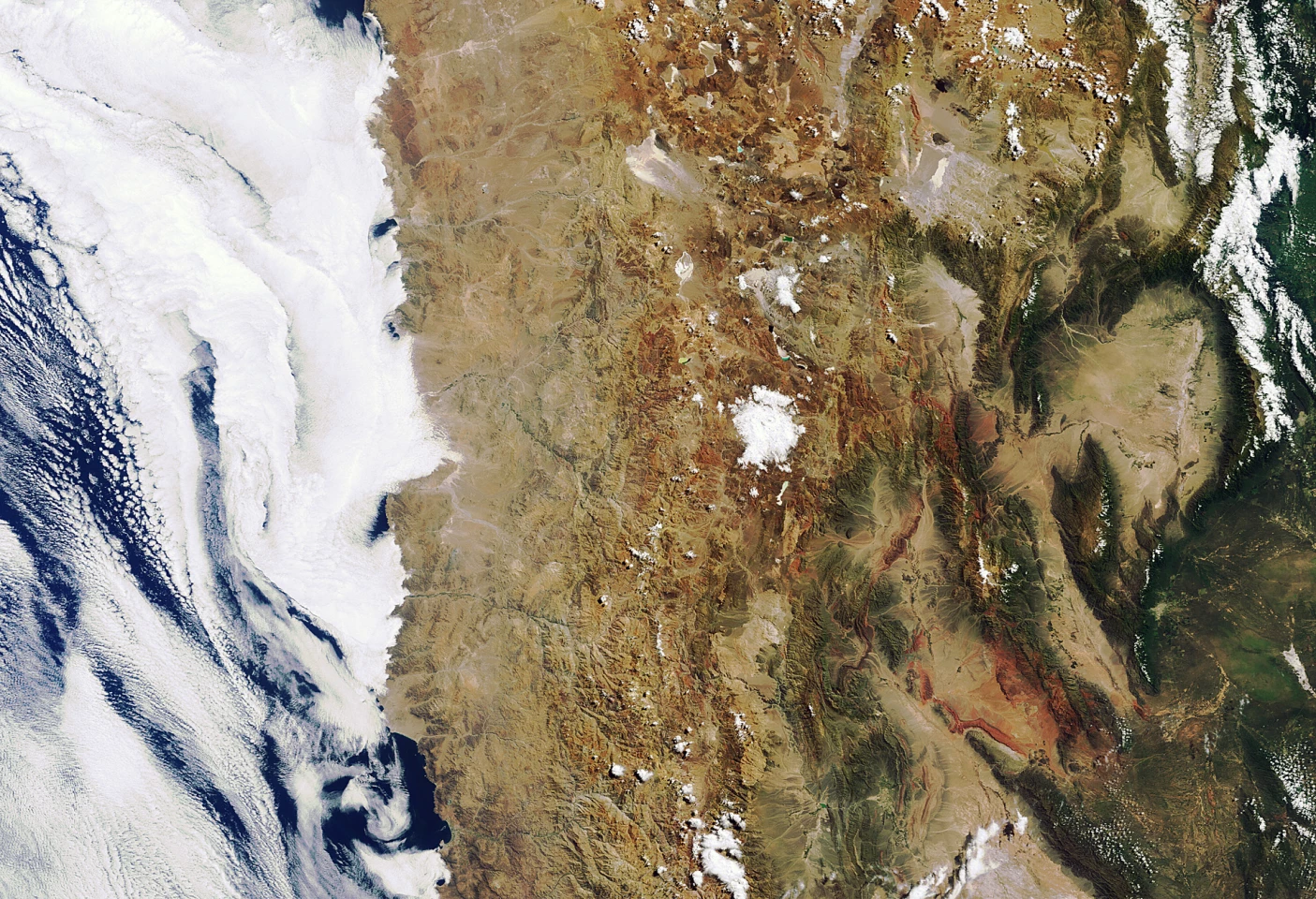
The Atacama desert in Chile is so dry that parts of it are utterly devoid of life down to bacteria. That and its sandy, rock-strewn terrain makes it so similar to Mars that it's a perfect spot for ESA to trial its Sample Acquisition Field Experiment with a Rover (SAFER), which will this week carry out tests related to navigation, remote control and the use of scientific instruments. The agency’s goal is the latest in a series of tests to develop technologies and gain practical experience in anticipation of ESA’s launch of the ExoMars rover to the Red Planet in 2018.
ExoMars is a major multi-spacecraft mission intended in part to look for life on Mars. A key component is the ExoMars rover. The trouble is, ESA hasn't sent a lander to the planet since the disastrous Beagle 2 mission in 2003, which ended with all contact being lost with the lander after it separated from the mothership. Worse, Beagle 2 was a static instrument package, not a rover. This means that ESA has a lot of catching up to do.
NASA has been sending landers into space since the 1960s and has been working with rovers in one form or another for almost as long. This gives the Americans a lot of experience to draw on, which ESA must now acquire in a much shorter time. ESA has a lot of experience working with satellites, but satellites face a much different set of problems from rovers.
"Unlike satellites, planetary rovers operate in close interaction with the topography and physical properties of the planetary surface," Michel van Winnendael, who oversees the SAFER project for ESA. "This implies limited data return from the rover during relatively short communication windows, with an inherent time delay."
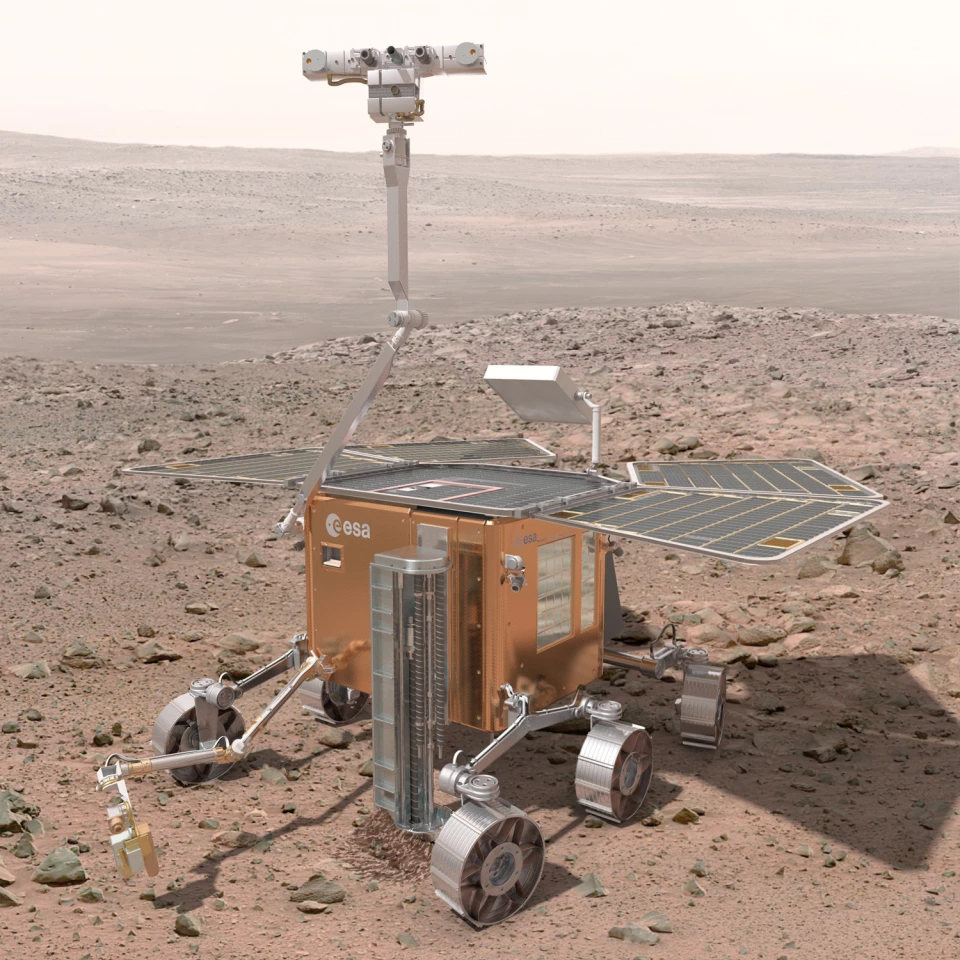
For the five-day test, ESA has sent a prototype rover based on the one planned for the ExoMars mission. Nicknamed "Bridget," it’s a six-wheeled rover equipped with a satellite link that connects it to the remote Control Centre (RCC) in Harwell, Oxfordshire, UK. There the ESA team will undergo its own tests by keeping to a schedule of Martian days called “sols."
Since a Martian day is slightly longer than an Earth day, this will mean the work day will creep around the clock. Also, because the RCC is simulating communications between Mars and Earth, the team will not be controlling Bridget directly. Instead, they will send it commands, which Bridget will download and execute itself the next “day.”
"This field trial is about optimizing the use of typical instruments and equipment aboard a Mars rover and generating a set of commands for the rover to execute the following day," says van Winnendael.
To help develop technologies and techniques, Bridget is equipped with three scientific experiments. There is a panoramic stereo camera for 3D imaging, a ground-penetrating radar to look beneath the surface, and a close-up imager with a resolution of a thousandth of a millimeter. According to ESA, the test will also carry out drilling operations similar to those planned for Exomars, though in this case, the ground crew at Atacama will stand in for the robotic drill.
"For the first time with SAFER we will attempt to integrate data from surface and subsurface instruments to explore how to transition from topsoil to underground operations," says ExoMars project scientist, Jorge Vago. "Since drilling plays an important role in the ExoMars rover’s search-for-life strategy, this is an important step. On Mars the best chances of accessing well-preserved molecular biosignatures deposited during the planet’s early, water-rich history lie in the subsurface, at depths below one meter, where the topsoil provides shielding from cosmic radiation damage."

Exactly how the tests will be carried out is uncertain because of the desire of the SAFER project to introduce an element of realism and, therefore, uncertainty. For example, last week, the ground team flew a UAV over the test area to take photographs. These were then sent to Harwell, where they will be used to simulate orbiter images to guide the test. Even the exact location of the test wasn’t selected until Sunday during a reconnaissance trip by the ground crew.
On Monday, Bridget was put through preliminary navigation and locomotion tests under the supervision of the Local Control Centre (LCC) at the Atacama site, where it negotiated the rocky desert terrain by vision and radar, sending data to its onboard computers. When the full tests begin RCC in Harwell will take over.
The SAFER team points out that Bridget operates at a very slow speed because of the necessity for the robot to both carefully scan the surrounding area and for the RCC to evaluate the data sent back.
According to the team's blog, it’s a bit like potholing. “Imagine it like you are exploring a newly discovered cave, it is dark, slippery and no-one has been there before. If you want your exploration to be a success you will need to proceed with care at a steady slow place and look around with your light often. Similarly our rover explores slowly and steadily, and uses it’s instrument suit to scan the terrain often.”
The video below shows Bridget conducting a locomotion test.
Source: ESA



