

Early last year, a team from the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) revealed a snake-inspired soft robot that harnessed kirigami, the ancient Japanese art of paper cutting, to propel itself along. Now some tweaks have given the robot boosts in both speed in precision.
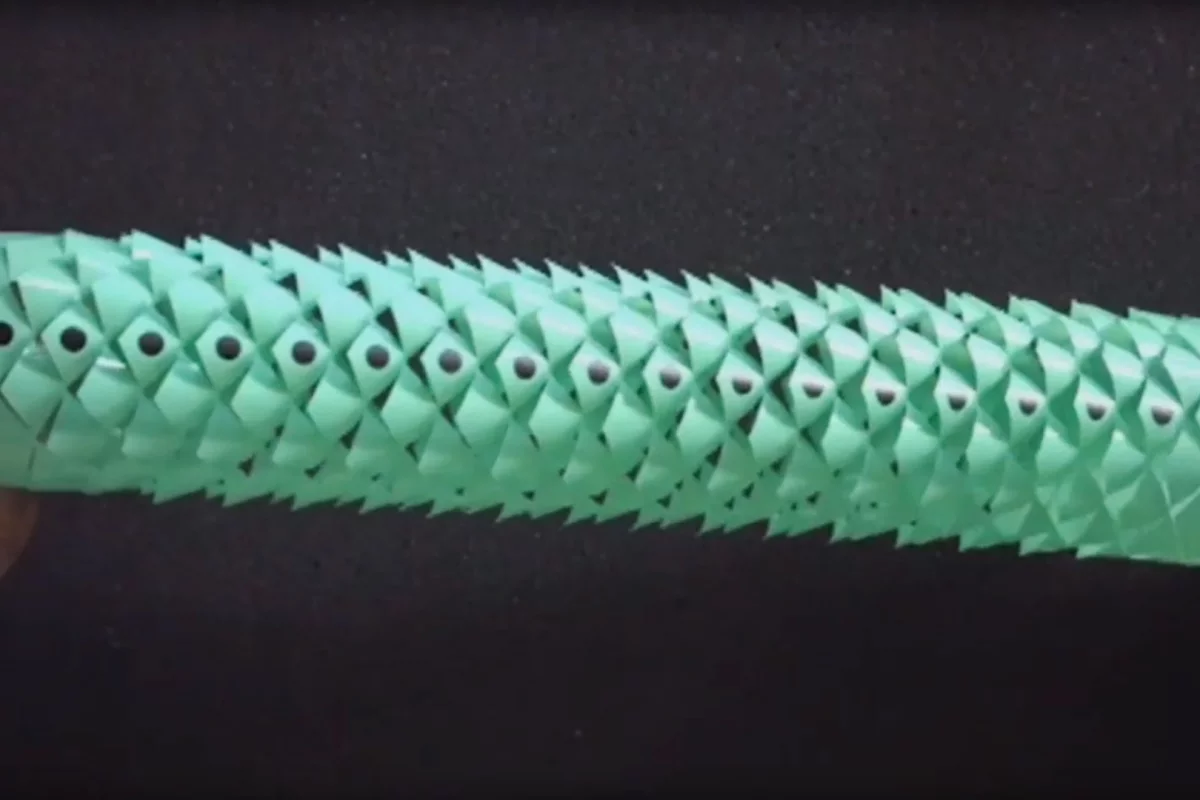
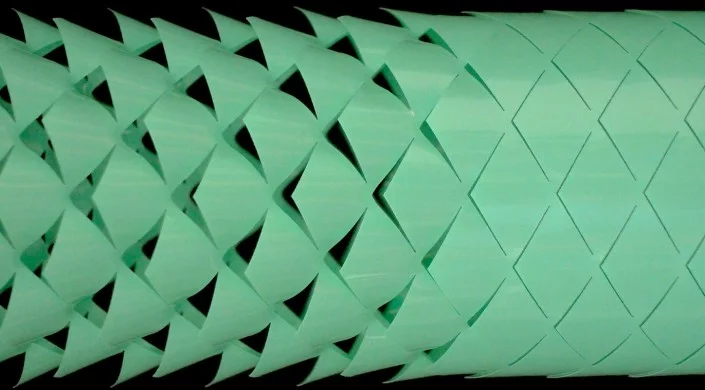
The team's original robot consisted of a flat kirigami sheet wrapped around an elastomer actuator whose "scales" all popped out along its length at the same time the robot was stretched. By altering the size of the cuts and rolling the sheet into a cylinder with force applied at either ends by an actuator, the researchers were able to exert greater control over the pop ups – keeping the cuts at a consistent size along the robot's length saw the pop ups propagate from one end of the robot to the other, while careful placement of different sized cuts allowed the pop ups to be programmed to deform in a specific sequence.
"By borrowing ideas from phase-transforming materials and applying them to kirigami-inspired architected materials, we demonstrated that both popped and unpopped phases can coexists at the same time on the cylinder," says Katia Bertoldi, the William and Ami Kuan Danoff Professor of Applied Mechanics at SEAS and senior author of the paper. "By simply combining cuts and curvature, we can program remarkably different behavior."
The end result is a robot that moves faster than its predecessor and can be directed with greater accuracy. In a race, a cylindrical robot whose pop ups propagate from back to front and back again was found to move slowest, while a robot whose pop ups all deform at the same time was slightly faster. But easily taking the lead was the robot whose pop ups were programmed to deform at either end, before propagating from the rear and back again.
The researchers believe such robots could one day be used to explore environments that prove difficult for other robots to maneuver through, or lead to devices for performing laparoscopic medical procedures. Towards such goals, the team is looking to create more complex deformations by developing an inverse design model.
"The idea is, if you know how you'd like the skin to transform, you can just cut, roll and go," said Lishuai Jin, a graduate student at SEAS and coauthor of the paper.
Check out the performance of various designs of robot in the video below.
The team's research appears in the Proceedings of the National Academy of Sciences.
Source: Harvard SEAS





