



A couple of years ago, the Willow Garage robotics company gave ten of its PR2 robots away to deserving research groups. The idea behind the project was that these groups would use the PR2s for robotics research, then share their discoveries with each other, thus advancing the field farther than would be possible if they each had to build their own unique robots from scratch. Now, a similar but unrelated project is underway, and this time the robots are designed specifically to perform surgery.
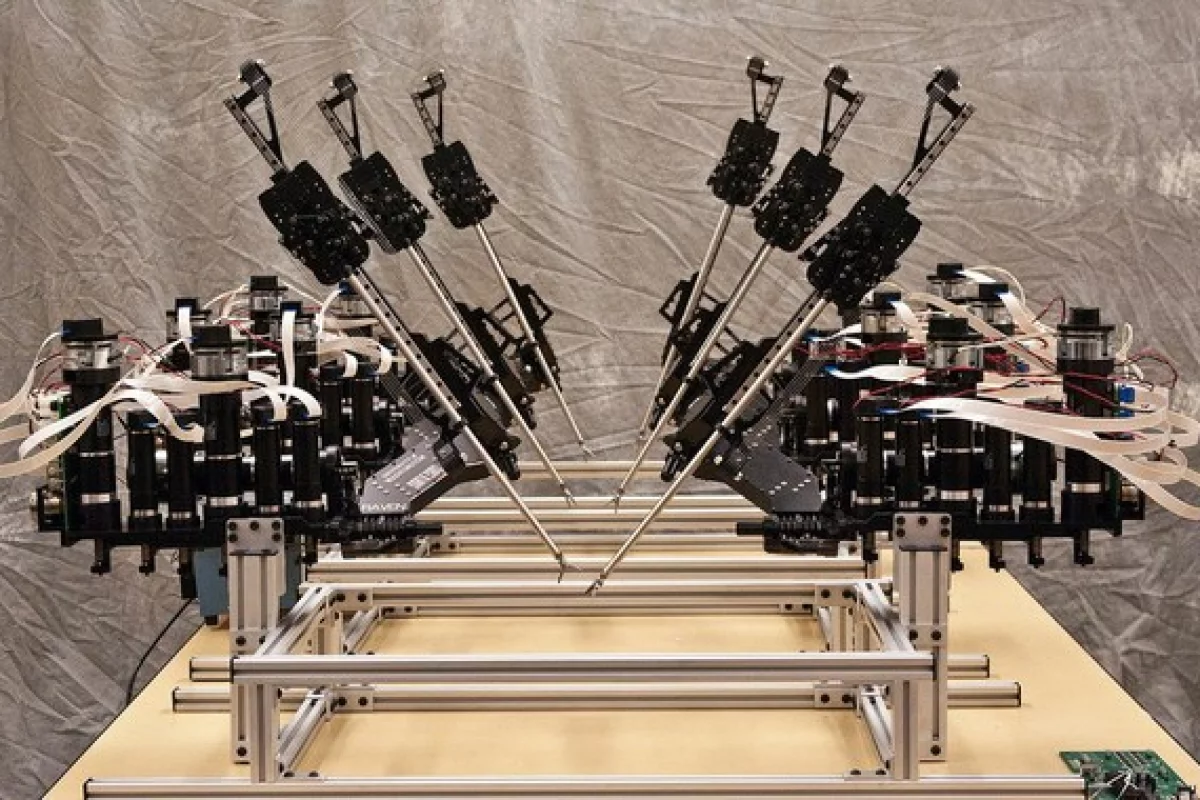
The National Science Foundation-funded project involves seven identical Raven II surgical robots, which were designed in a joint effort between the University of Washington (UW) and the University of California, Santa Cruz. At the end of this month, five of the robots will be shipped from UW to medical robotics researchers at Harvard University, Johns Hopkins University, the University of Nebraska, UC Berkeley, and UCLA. The other two robots will remain at UW and UC Santa Cruz.
There are reportedly already four other universities waiting to get their own Raven IIs.
Each system consists of a two-armed surgical robot, a guiding video camera, and a surgeon interface system (which could be located far from the robot). They are run by software created using the popular Robot Operating System, which should allow them to be compatible with many other robotic devices. All of the systems are open-source, and will be linked with one another via the internet. In this way, the groups can work together on collaborative experiments, and share data on the new hardware, software and algorithms that they each develop.
"These are the leading labs in the nation in the field of surgical robotics, and with everyone working on the same platform we can more easily share new developments and innovations," said UW's Blake Hannaford.
The UW video below shows the Raven II in motion, in the lab.





