





We know that plankton are too small and weak to swim on their own, so how do these little drifters get to where they need to go? Seeking answers to this question along with other insights about our oceans, scientists have built underwater robots that mimic plankton behavior and can be used to monitor surrounding ocean conditions, with their early experiments confirming long-held theories on how plankton do what they need to do to survive.
Around 20 years ago, Peter Franks, a biological oceanographer at the Scripps Institute of Oceanography at the University of California San Diego, published a mathematical theory arguing that plankton gather in dense patches with help from what are known as internal waves.
His thinking was that the microscopic organisms hitched a ride on these giant, slow-moving underwater currents and congregated in large gatherings for the purposes of feeding, reproduction and protection from predators. These plankton summits can sometimes appear as "red tides" at the ocean's surface, red stripes that are parallel to the shore.

Unfortunately for Franks, testing his theory was out of the question as it would involve tracking the movements of the individual plankton as they moved through the ocean, each smaller than a grain of rice. But 20 years is a long time in robotics, and now with the help of his colleague Jules Jaffe, Franks has his hands on robotic versions of plankton that can help to answer some of his questions.
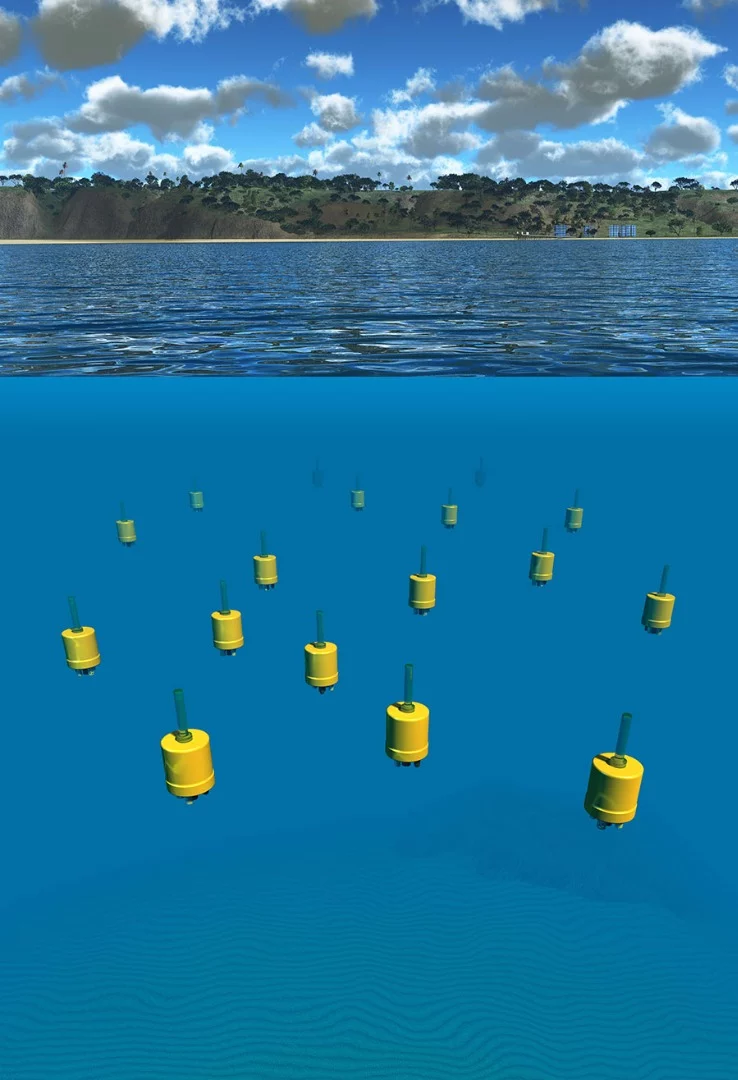
Dubbed miniature autonomous underwater explorers (M-AUEs), the grapefruit-sized underwater robots carry temperature and other sensors to track the ocean conditions. They drift with the ocean currents and are able to adjust their buoyancy on the fly as a way of maintaining a constant depth, much like real plankton do.

The team ran an experiment where 16 M-AUEs were deployed in a 16-strong swarm spanning 300 m (984 ft) in diameter. The bots were programmed to remain at a depth of 10 m (33 ft) and collect information on their trajectories every 12 seconds through acoustic signaling. The researchers found that the troughs of these internal waves were ushering the robotic plankton into their congregations for tens of minutes at a time, and that the data gleaned from the experiment backs up Franks' predictions all those years ago.
"The internal waves move water up and down," Franks explains to New Atlas. "If the plankton (and M-AUEs) maintain a constant depth, they will have to swim up and down as the wave passes by. But the waves also drive a horizontal current. As the organisms swim, they are moved by this horizontal current, which causes them to squeeze together over the wave trough, and pull apart over the wave crest."
In summary, the team says the experiment helped them confirm that free-floating plankton, and any other similarly-behaving organism (or robot) for that matter, can use the dynamics of the ocean to gather into swarms and fulfill their needs for survival.
Looking ahead, the researchers have plans to add cameras to the robots to endow them with photo-mapping abilities and to build hundreds more of the plankton stand-ins. These larger swarms could be used to study the movement of larvae between protected areas and even track oil spills, while the onboard hydrophones used to track their location underwater could double as an ear in the ocean to listen into whales and dolphins.
"This swarm-sensing approach opens up a whole new realm of ocean exploration," says Jaffe.
The research was published in the journal Nature Communications.





