



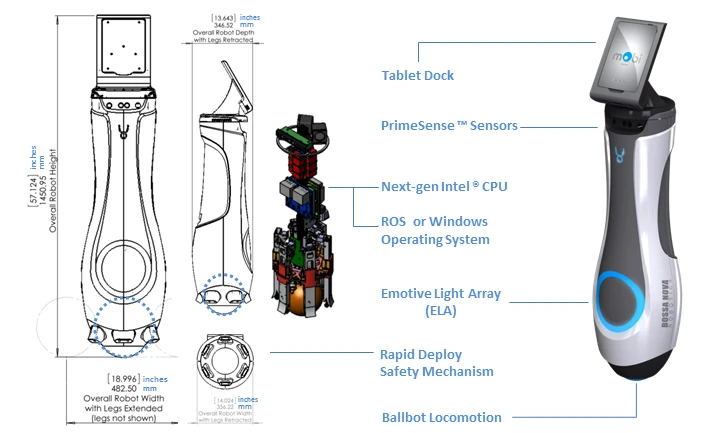
Bossa Nova Robotics, a spin-off of Carnegie Mellon University's Robotics Institute, has announced a new research platform called mObi. The mObi platform is based on a design by Professor Ralph Hollis, who developed a robot that balanced and moved on a ball instead of wheels, called the Ballbot. Thanks to its unique form of locomotion, mObi moves gracefully in any direction and could be put to work as a telepresence robot in the future.
Although it is being billed as a personal robot, mObi likely won't see much use outside of labs – at least, not for the next few years. It comes with a dock, which can secure a tablet on top, facilitating face-to-screen conversations through a service like Skype. It could also follow you by keeping track of your whereabouts with a PrimeSense sensor (similar to to the one used in the Microsoft Kinect).

The original Ballbot had excellent balance, so that's not much of an issue. However, there are some drawbacks to this approach, the most obvious being that it is only stable when its support legs are extended. These unique tendrils, originally developed by Ben Brown, act like a kickstand to catch the robot before it falls, and support it when it is at rest. These deploy in a fraction of a second even without power, which should put any worries of it falling over to rest. That said, it's unclear how the robot will fare when moving over bumps, like the transition from hardwood to carpet or tiles.
Other issues, like its inability to open doors or negotiate stairs, will prevent it from being very useful outside of offices and hospitals, but those are big potential markets. Bossa Nova Robotics have yet to announce mObi's price, but rumors suggest it will be relatively cheap, and it will be available to developers next year. You can see mObi in action at its RoboBusiness 2012 presentation below.
Source: Bossa Nova Robotics via This Week in Creepy Robots





