
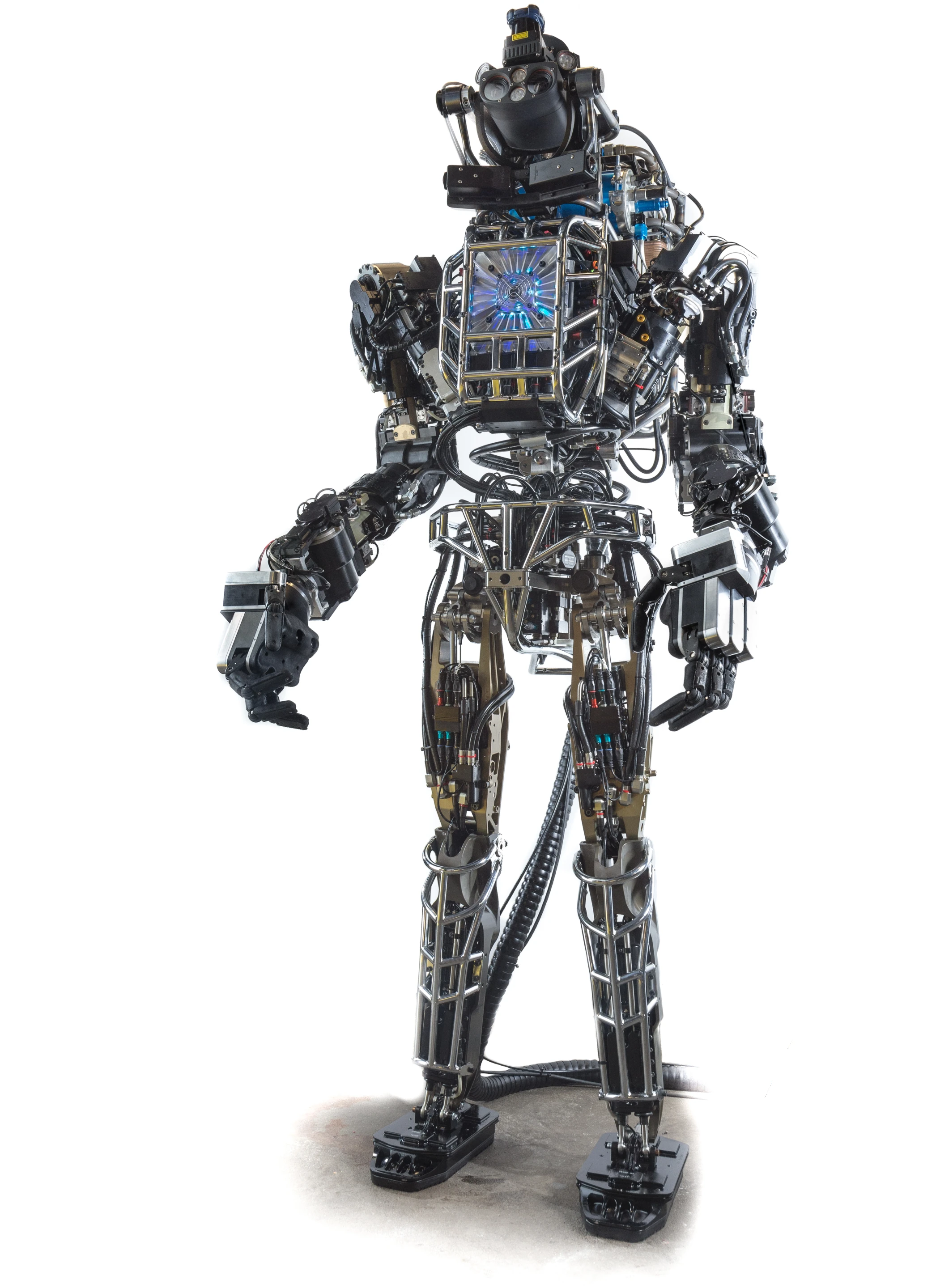
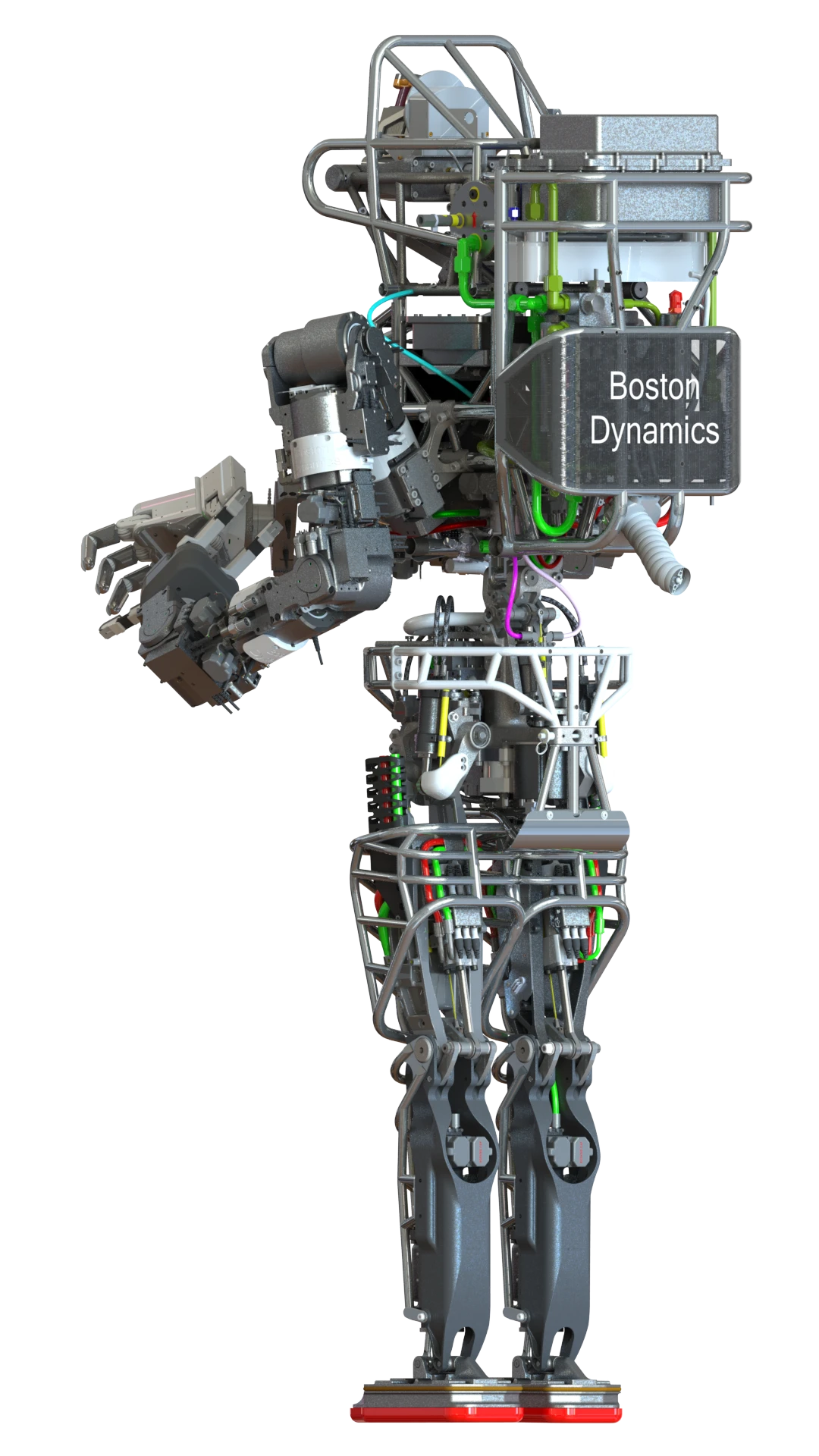
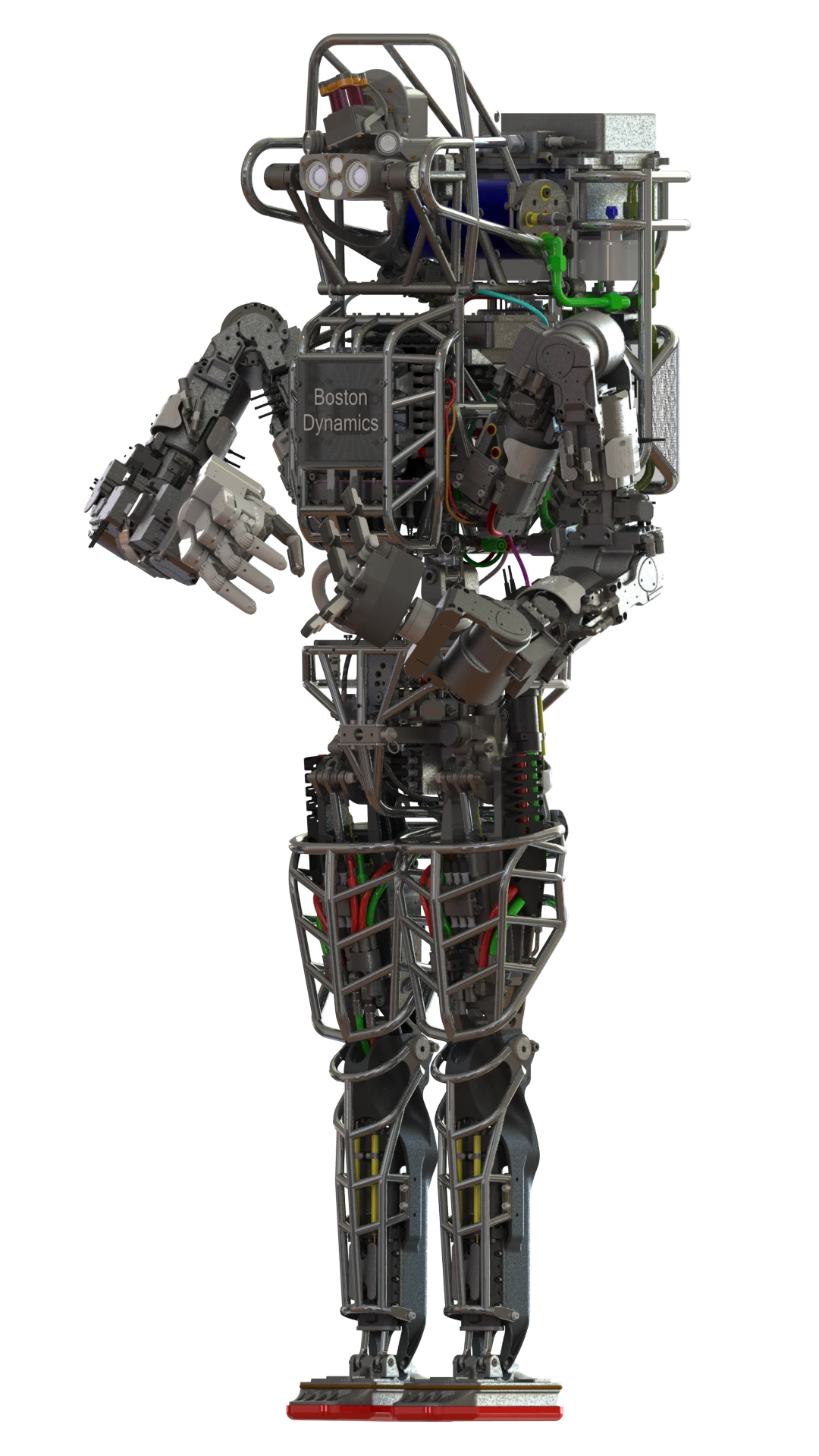

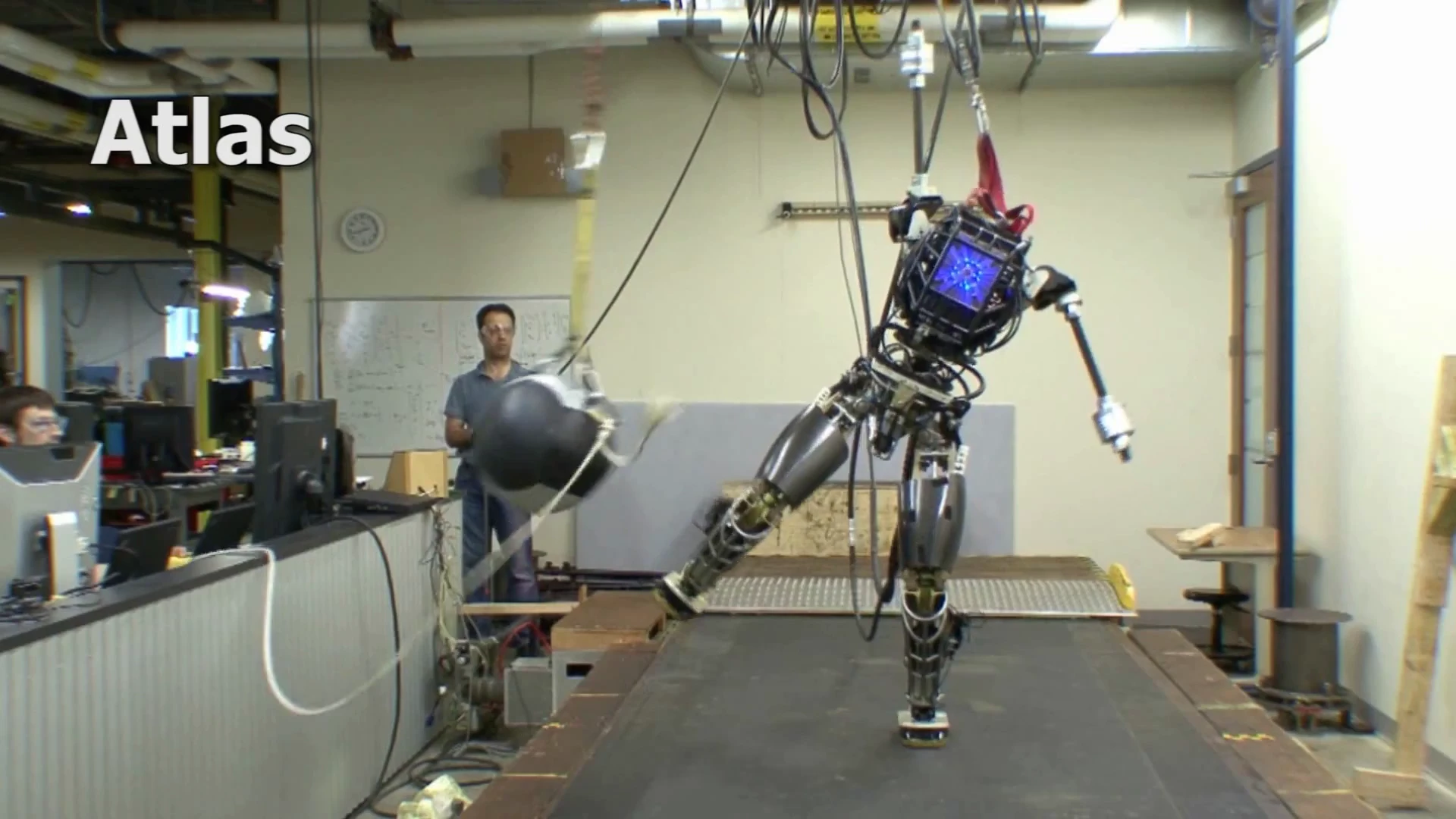


DARPA has revealed the completed ATLAS humanoid robot, which is to star in the upcoming DARPA Robotics Challenge (DRC) – and it cuts a striking figure. Designed by Boston Dynamics (the guys behind the BigDog, Cheetah, and LS3 quadrupeds), it's being given to the top teams that recently competed in the Virtual Robotics Challenge (VRC). Now those teams have less than six months to fine tune their software with the real robot before they face the first of two live challenges.
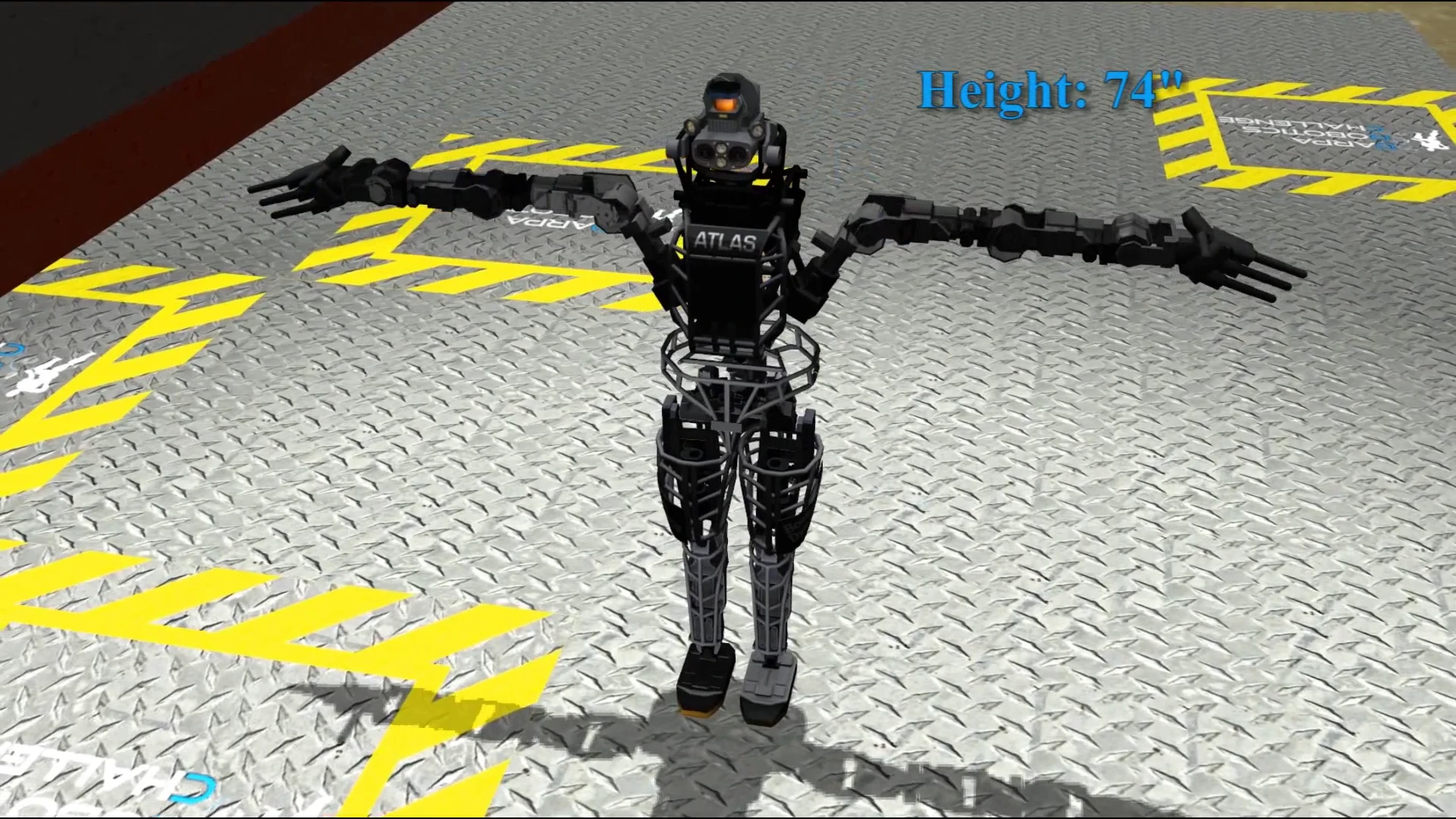
Standing 6 ft 2 in (1.88 m) tall, and weighing 330 lb (150 kg), ATLAS towers over most people. To put that into perspective, the HRP-4, a Japanese robot designed to work alongside people, stands just 5 ft (1.5 m) tall and weighs a scant 86 lb (39 kg). It's the heavy-duty sibling of the company's PETMAN robot, which was designed to test chemical protection suits.
Like its quadrupeds, Boston Dynamics' engineers opted to go with hydraulics for powering its 28 joints, so it is equipped with a hydraulic pump and a thermal regulator. Hydraulic power gives it a lot more strength than the electric motors found in most other humanoid robots, but the trade-off is they're a bit more difficult to control. In turn, ATLAS is also power hungry, requiring a tether for its 480 V three-phase power at 15 kW and for its 10 Gbps Fiber Optic Ethernet networking connection. It carries its own real-time control computer, but it will be fed commands by human operators.
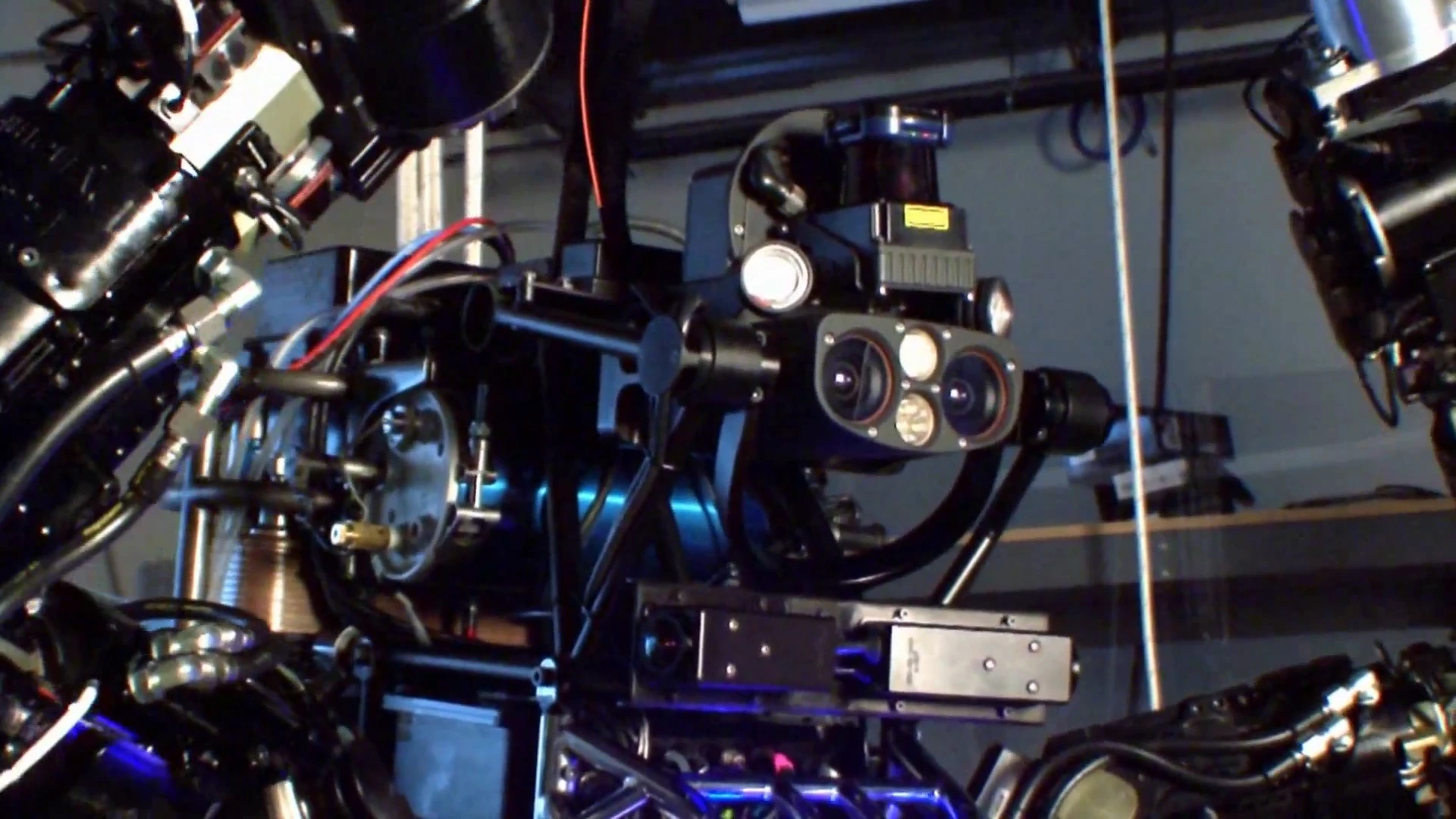
The robot also contains parts developed outside of Boston Dynamics. Some of ATLAS' height, for example, comes from a large sensor head with LIDAR and multiple cameras developed at Carnegie Mellon University, while its four-fingered hands are provided by iRobot and Sandia National Labs.
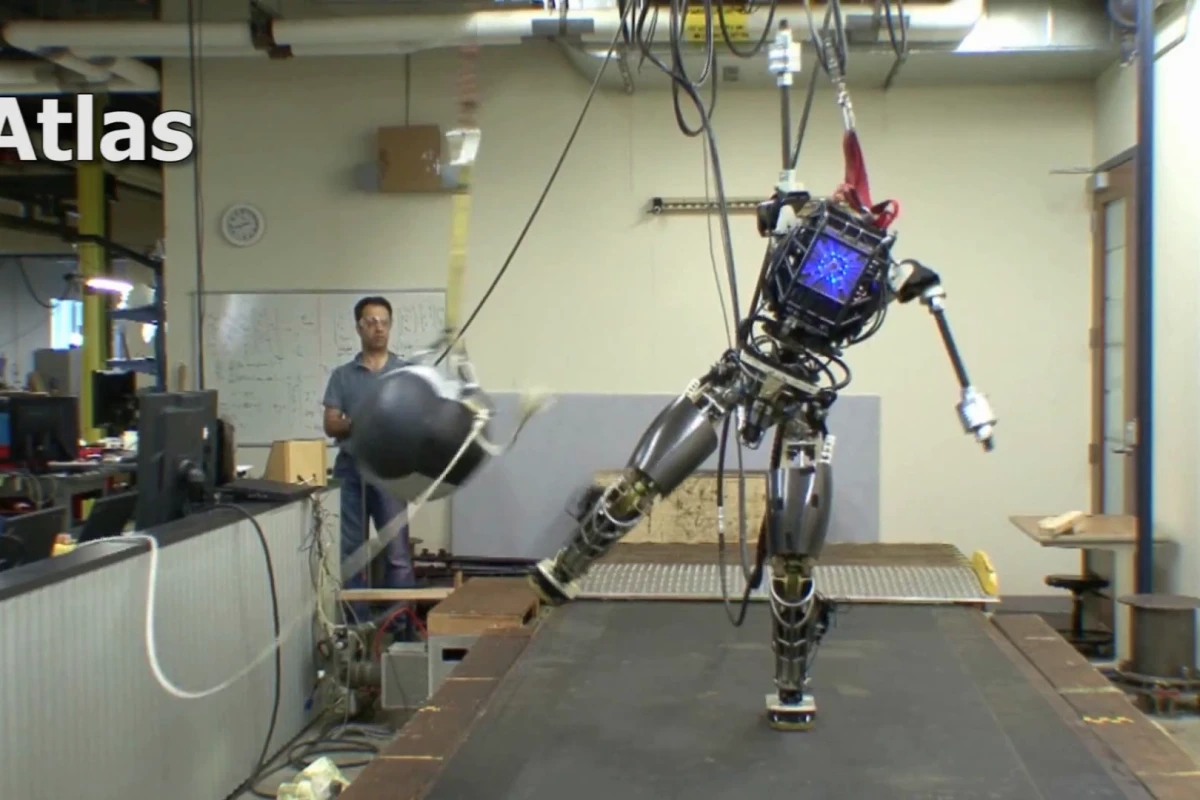
ATLAS is no pushover, and I mean that quite literally. Check out how it stands up to being hit with a 20 lb (9 kg) ball in the following video:
There were two sets of "tracks," or divisions, competing in the software challenge. Teams in Track B were given funding, while teams in Track C were not, but they each had equal access to the DRC simulator, which not only provided the means of controlling the simulated robot in the recent VRC, but will also act as a pass-through for controlling the physical robot during the DRC Trials and the DRC Finals. The VRC winners to get their own ATLAS robot and a cool US$750,000 in DARPA funding are as follows:
- Team IHMC, Institute for Human and Machine Cognition, Pensacola, Fla.
- WPI Robotics Engineering C Squad (WRECS), Worcester Polytechnic Institute, Worcester, Mass.
- MIT, Massachusetts Institute of Technology, Cambridge, Mass.
- Team TRACLabs, TRACLabs, Inc., Webster, Texas
- JPL / UCSB / Caltech, Jet Propulsion Laboratory, Pasadena, Calif.
- TORC, TORC / TU Darmstadt / Virginia Tech, Blacksburg, Va.
- TROOPER, Lockheed Martin, Cherry Hill, N.J
One more team, dubbed Team HKU, will get to compete thanks to the generosity of the Hong Kong University, which is paying for an additional robot. It's a combination of two teams from Track C; Team K (Japan) and Case Western University (Cleveland, Ohio).
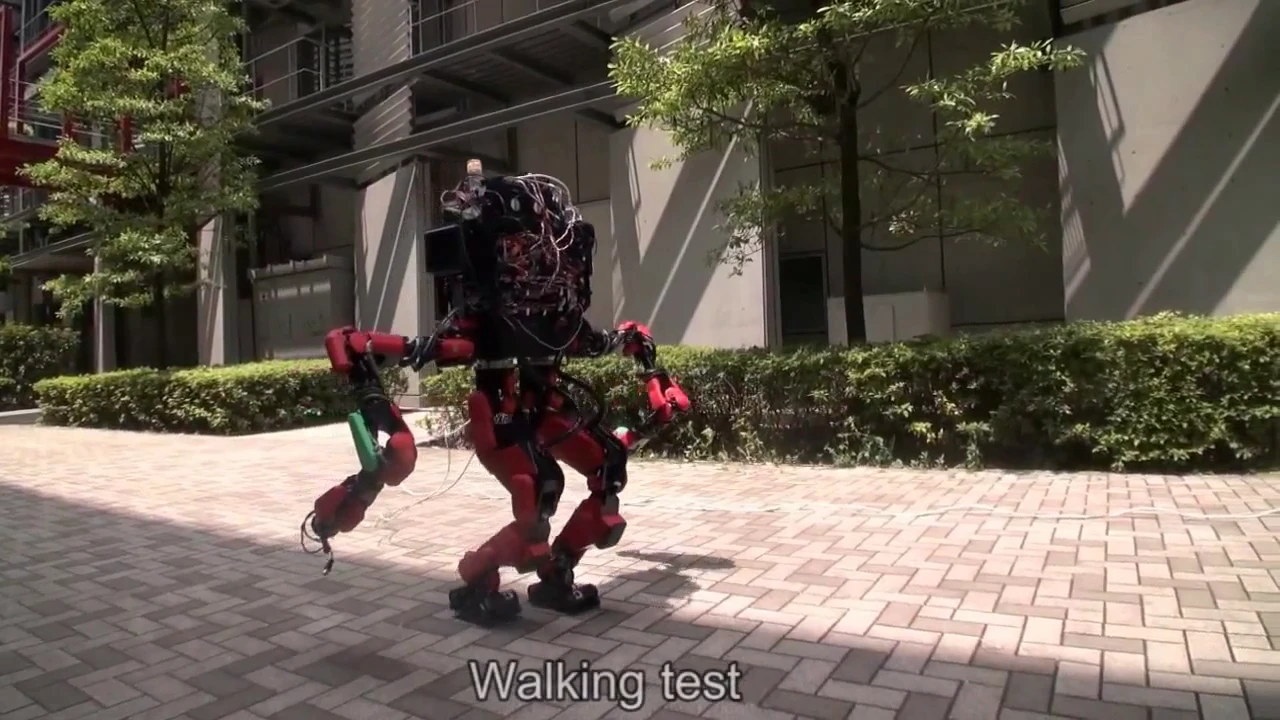
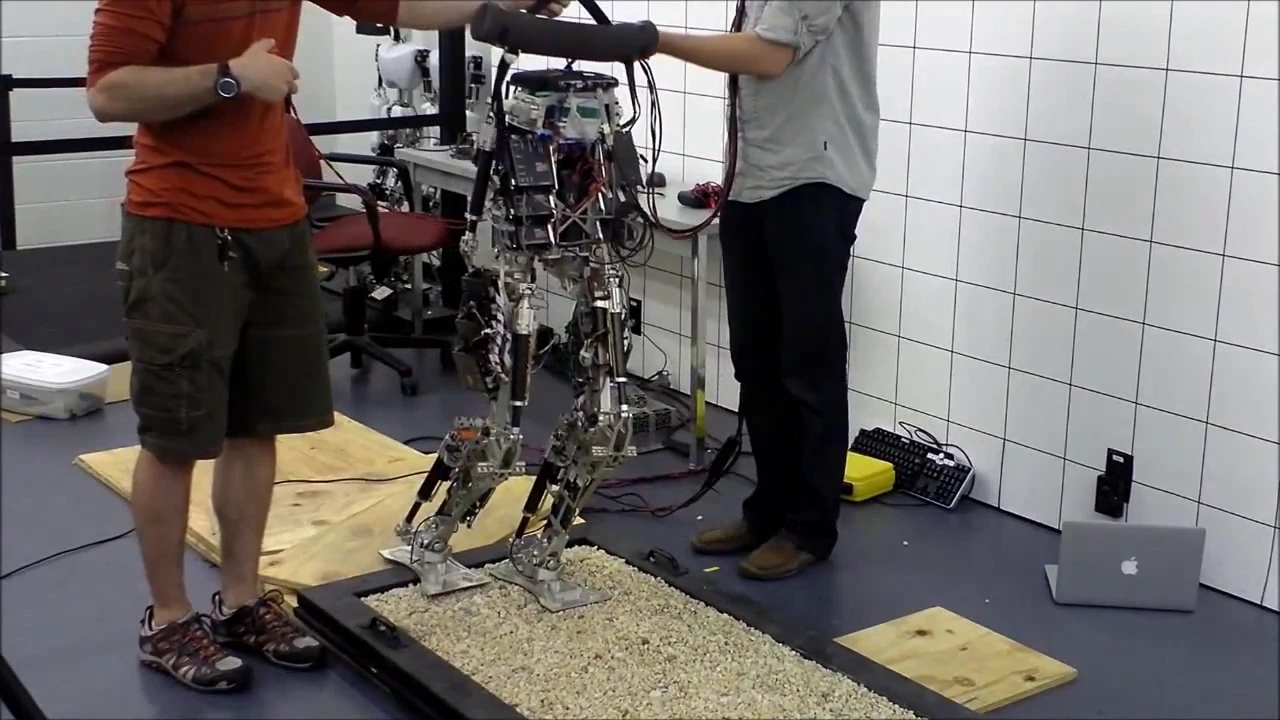
Note that Track A consists of teams building and programming their own custom robots. You can see how they're coming along in this video:
"The Virtual Robotics Challenge was a proving ground for teams' ability to create software to control a robot in a hypothetical scenario. The DRC Simulator tasks were fairly accurate representations of real world causes and effects, but the experience wasn’t quite the same as handling an actual, physical robot," said Gill Pratt, program manager for the DARPA Robotics Challenge. "Now these seven teams will see if their simulation-honed algorithms can run a real machine in real environments. And we expect all teams will be further refining their algorithms, using both simulation and experimentation."
Following the first live challenge this December, the final showdown is scheduled to take place at the end of 2014. The DRC is set to have a profound impact on the future of robotics, disaster response scenarios, and perhaps even the military, so you can count on Gizmag for continued coverage it as it all unfolds.





