














If you thought the monkey-like robot AMEE seen in the Val Kilmer sci-fi flick Red Planet was a tad far-fetched, think again. The German Research Center for Artificial Intelligence (DFKI) and the University of Bremen are working on an ape-like robot called the iStruct Demonstrator that it classifies as a "Space Robot." Lately the mechanical monkey has been practicing how to walk and balance in the center's mock lunar landscape.
Exploring the hazardous lunar landscape calls for a variety of forms, and researchers at the DFKI are exploring their options (including a combination of legged and wheeled robots). An ape-like body has certain benefits over a wheeled robot; its four-legged stance is stable when scrambling over obstacles or hilly terrain, and it can easily right itself if it falls over. Then when it needs to do something with its hand(s), it could feasibly balance on its hind legs to free them up for manual work. The CHIMP robot currently being developed for the DARPA Robotics Challenge has adopted a similar strategy.
With renewed international interest in lunar missions, there is a remote possibility that iStruct (or one of its descendants) could be frolicking on the Moon at some point in the future. Colonizing the Moon with robots begins by developing one that can move and react intelligently to whatever situation it finds itself in.
To that end, the goal of the project is to build "biologically-inspired intelligent structural components" and a robot system to test them on, to test and improve the robot's ability to react to its surroundings. The robot contains an articulated spinal column connecting the torso and pelvis, giving it more flexibility, and sensor-laden foot and ankle structures which react to the ground.
Other features include:
- 43 individual force-sensing resistor (FSR) sensors
Most humanoid robots already contain many of the same sensors, but the iStruct's articulated spine (which can function as a 6-axes force-torque sensor) is something of a rarity outside of musculoskeletal robots and helps when moving on all fours. The sensors in the foot and ankle allow it to maintain its balance on sloped terrain.
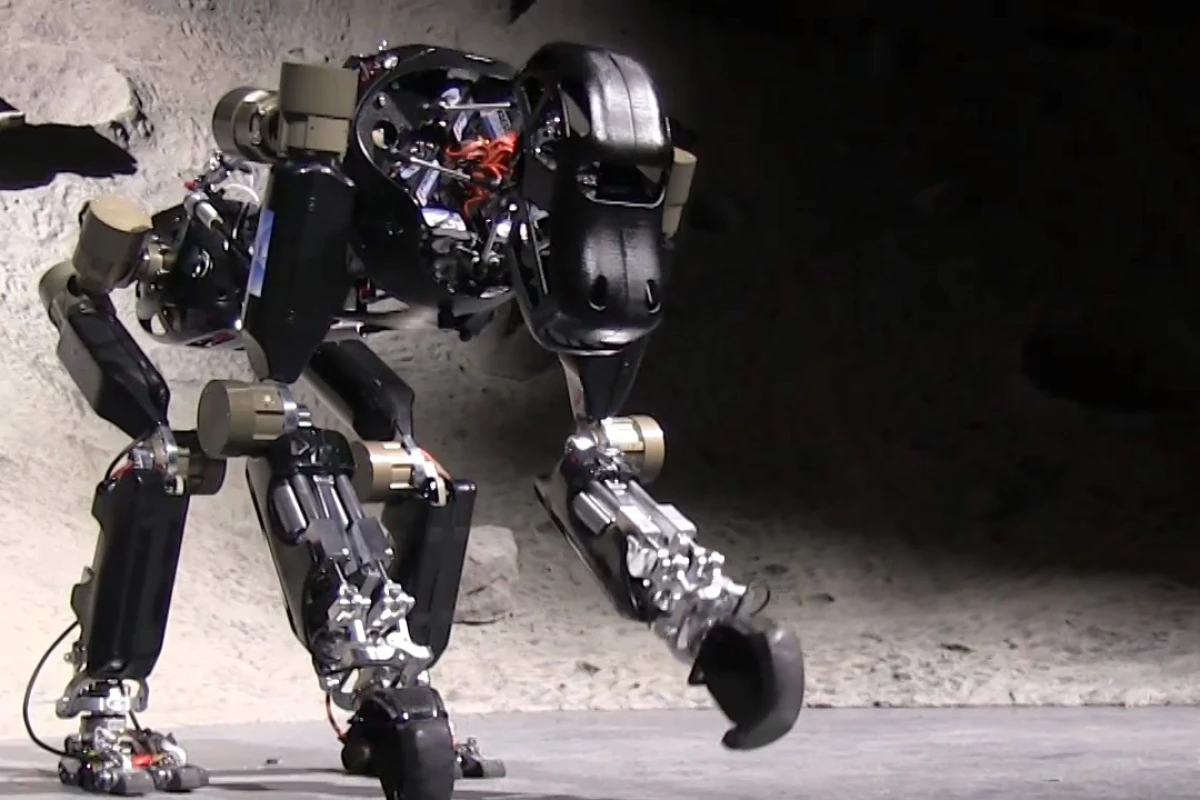
Back between 2008 and 2009, Dipl.-Inf. Daniel Kühn worked on a similar robot called the Little Ape, which was already capable of simple quadrupedal walking. After that project wrapped, he began work on the iStruct, which features some significant upgrades. It's larger, weighing 18 kg (40 lb) and measuring 66 x 43 x 75 cm (26 x 17 x 29 in), and contains 26 degrees of freedom powered by a variety of electric motors. The project is due to be completed this August.
You can see how it uses its intelligent foot and ankle structures to walk and maintain its balance in the videos below. It's a small step for a robot ape, but a potentially giant leap for robot ape kind.
Source: DFKI Robotics





