



An ambitious group of Harvard researchers is developing a soft exosuit and harbor some grand ambitions for their high-tech mobility aid. Making use of soft and comfortable fabrics, the lightweight wearable robot could one day help sufferers of strokes, multiple sclerosis, Parkinson's disease and even healthy soldiers that carry heavy loads, to move with more freedom. But before that can happen, the team needs to quantify how much energy exactly the suit is capable of saving. In a newly published study, the team has taken another step toward their lofty goal, isolating the suit's load-bearing benefits and determining that a tethered version can result in energy savings of almost 23 percent.
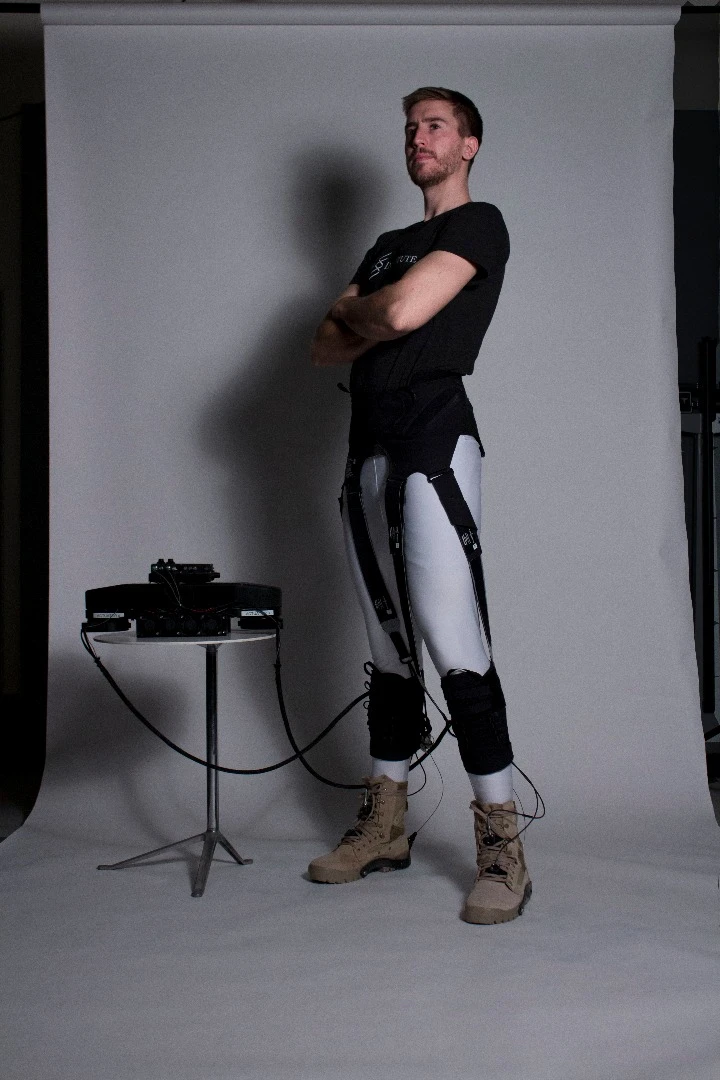
Developed at Harvard's Wyss Institute, the soft exosuit is quite different to the number of exoskeletons we've looked at in the past, such as the REX, ReWalk and Mindwalker which all feature rigid materials. The suit is designed for people that can already walk on their own but may need assistance due to age or other conditions that impact their mobility. The system consists of functional textiles, cable-based actuation and a control system that takes its cues from the user's individual walking mechanics and provides assistance to specific leg joints, rather than the entire limb.
Sangjun Lee, a researcher at the Harvard Biodesign Lab, tells us that the exosuit has been significantly improved since we last saw it, with new lightweight textile materials that offer higher tensile stiffness and better comfort. The motors and electronics have also been upgraded. A full-body version of this suit would provide assistance in both hip and ankle extension, but for their latest study, the team set out specifically to assess its impact on the ankle joint in healthy subjects.
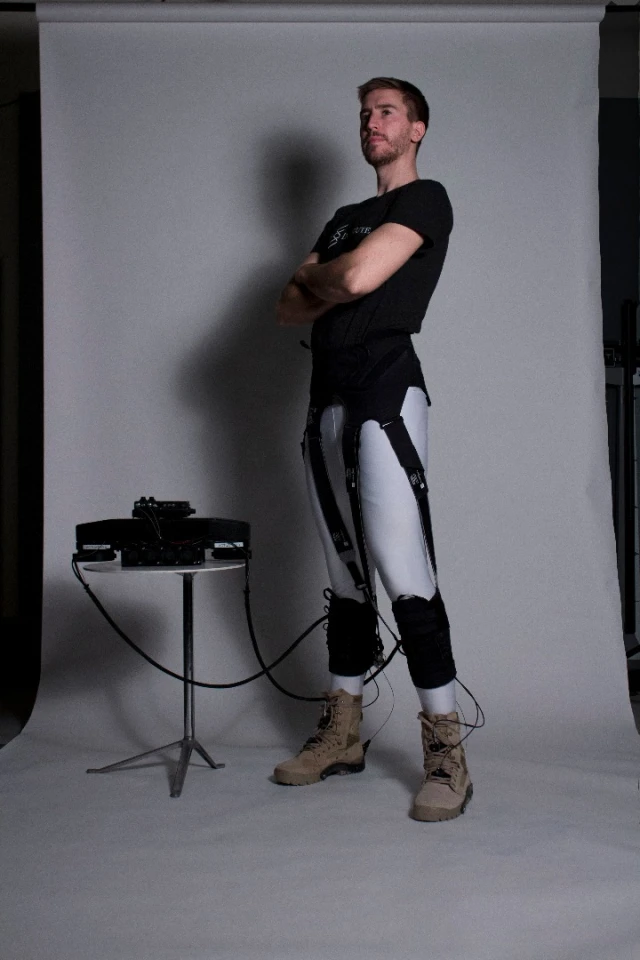
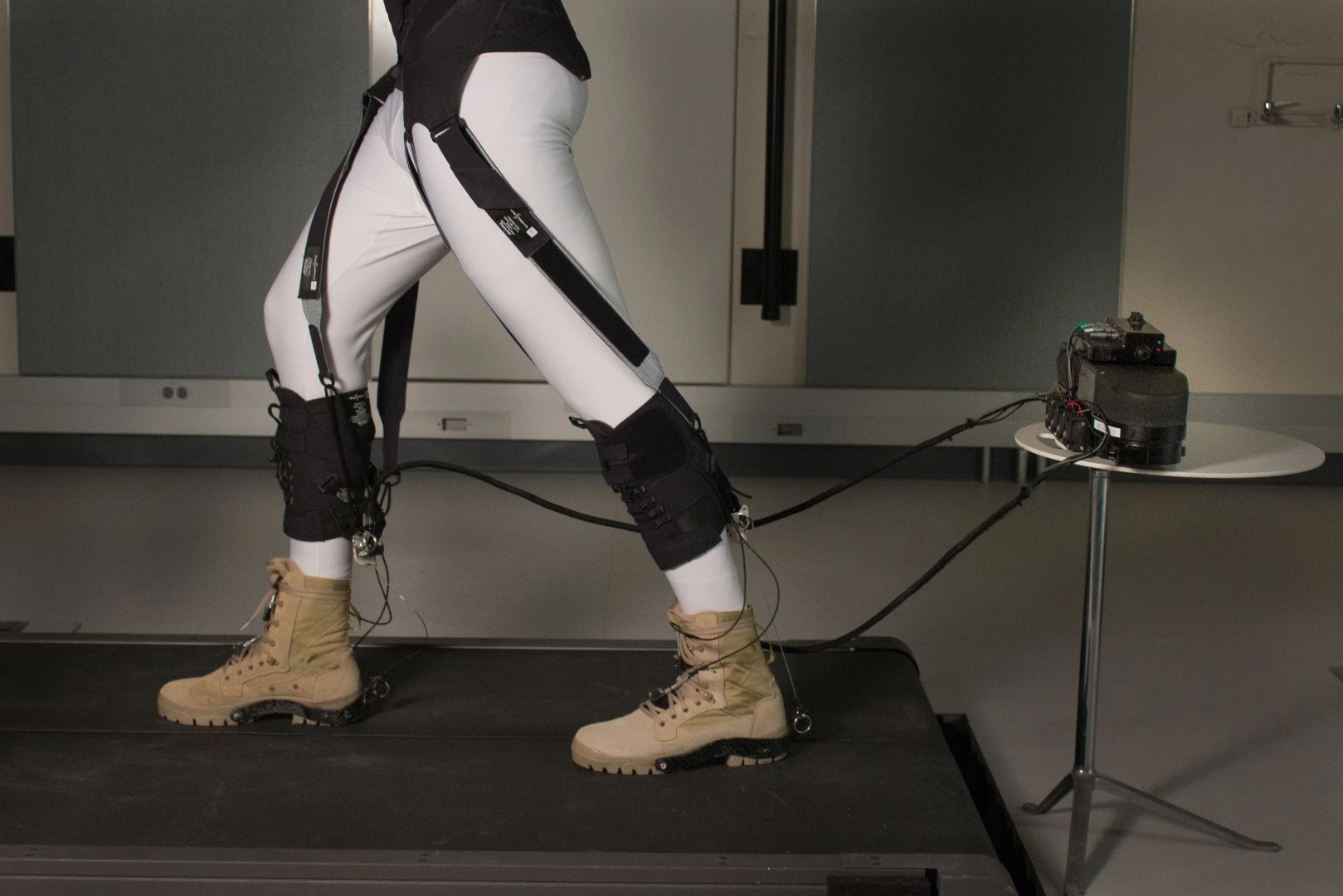
"One of the major purposes of this study was to isolate the effect of exosuit assistance from the effect of carrying weight of the actuator system (motors, batteries, electronics, etc)," Lee explains to New Atlas. "For this, we have built an offboard actuation system that can stay off from the wearer (next to the treadmill) and transmit the force via Bowden cables. This helped us to better understand the isolated effect of the exosuit assistance. Thus, when unpowered, the subject is only wearing the textile which weighs similar to an average pair of pants and the cables are completely slack and thus do not interfere with the user's gait."
The researchers had seven suited-up participants walk on a treadmill at 1.5 m per second (3.3 ft per second) using the offboard actuation system. This setup allowed the team to focus on the energy-saving potential of the suit when applied directly to the ankle joints, though the design does indirectly assist the hip joints by way of straps connecting the lower legs to the front of the hip.
"In a test group of seven healthy wearers, we clearly saw that the more assistance provided to the ankle joints, the more energy the wearers could save with a maximum reduction of almost 23 percent compared to walking with the exosuit powered-off," said Conor Walsh, leader of the research. "To our knowledge, this is the highest relative reduction in energy expenditure observed to date with a tethered exoskeleton or exosuit."
While this tethered configuration for healthy subjects doesn't represent how the researchers imagine wearers eventually using the suit, the new information will help them find a "sweet spot," in trying to offset the weight of the system with the amount of force required to optimize energy savings in the user.
"This study was not designed for a specific disability or patient population," said Brendan Quinlivan, a researcher in Walsh's lab. "However, understanding the response of healthy individuals is the first step towards developing these devices for individuals with gait impairments. The better we understand how these systems perform on healthy subjects the better we will be able understand how they perform on individuals with gait impairments."
From here, the team will now look to perform studies that explore the energy-saving effects with a full-body version of the exosuit where the weight is carried by the user. The team's research was published in the journal Science Robotics.
Source: Harvard University





