

The world’s first fleet of autonomous boats is growing – literally. After years of tests and upgrades, MIT’s self-driving Roboat has now doubled in size, allowing it to carry two people at a time. The boats have also had an intelligence upgrade and can now move in coordinated groups.
The Roboat project began in 2016, with the vision of a series of floating platforms that could navigate waterways on their own, ferrying passengers and cargo around, monitoring the environment or connecting together to form temporary bridges or stages. By 2018 they’d been upgraded to be smarter and more agile, and in 2019 they gained the ability to dock together in different arrangements.
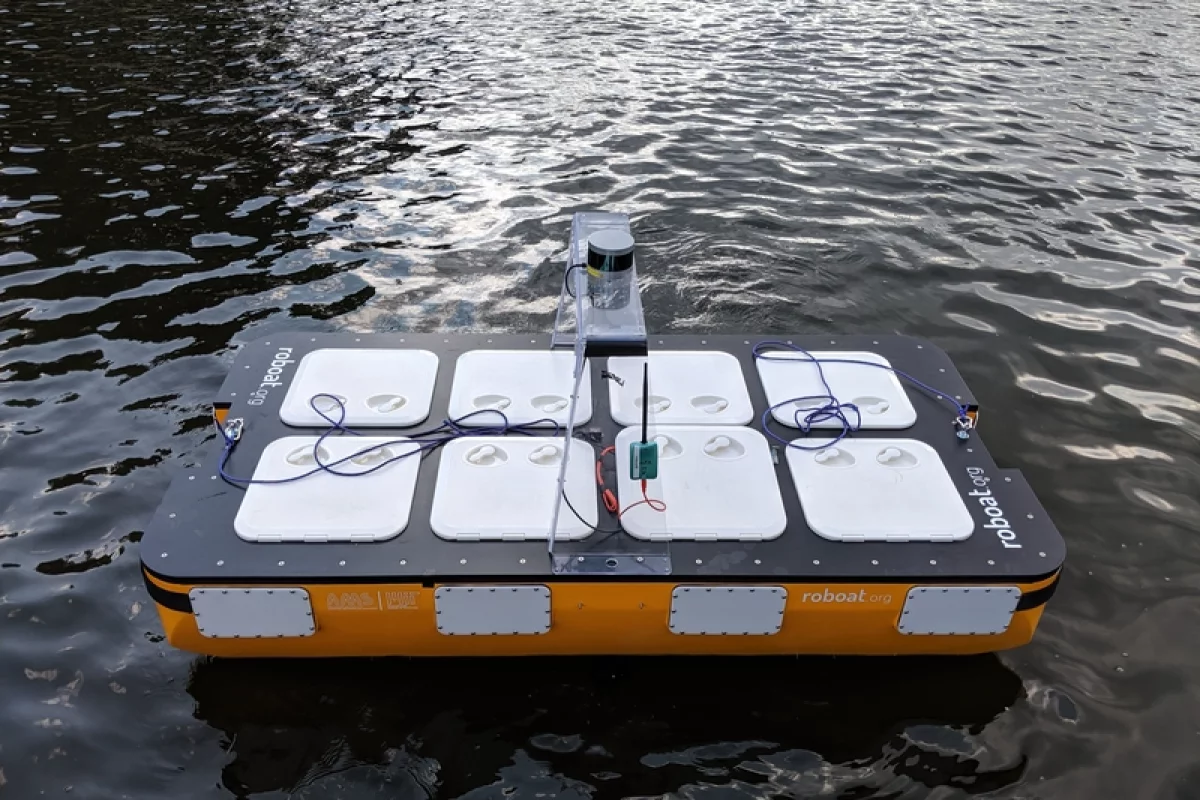
And now, they’ve had their biggest upgrade yet, leading the team to call the new version Roboat II. Previous models were at most 1 m (3.3 ft) long, which is just a quarter-scale model of the planned final version’s 4 m (13.1 ft) length. But the new Roboat II steps up to half-scale, at 2 m (6.6 ft), which means it’s finally big enough to carry passengers. The researchers demonstrated that by climbing in in pairs and letting the boat take them for a ride.
Roboat II is also much smarter now, thanks to a fancy new Simultaneous Localization and Mapping (SLAM) algorithm that helps the craft decide the fastest and most direct route to its destination, constantly updating the plan as it senses its surroundings with lidar, GPS, and an inertial measurement unit (IMU).
Ultimately, the team envisions a kind of water-based Uber service. When a rider places a request, an overall system controller will assign the nearest Roboat to pick them up. That boat will then autonomously make its way there using the SLAM algorithm.
In tests, the team sent the Roboat II down the canals of Amsterdam, and it was able to make a three-hour round trip with a margin of error of only 17 cm (6.7 in).
“The development of an autonomous boat system capable of accurate mapping, robust control, and human transport is a crucial step towards having the system implemented in the full-scale Roboat,” says Wei Wang, lead author on the study. “We also hope it will eventually be implemented in other boats in order to make them autonomous.”

But these Roboats won’t be operating in isolation, so the team also kitted them out with a new system that lets them connect and move together like a swarm. One Roboat is designated a leader, and this vessel is given the destination instructions. There’s no direct communication between the leader and the followers – instead, the followers estimate where the leader is going and try to keep up.
“Current cooperative algorithms have rarely considered dynamic systems on the water,” says Carlo Ratti, co-author of the study. “Cooperative transport, using a team of water vehicles, poses unique challenges not encountered in aerial or ground vehicles. For example, inertia and load of the vehicles become more significant factors that make the system harder to control. Our study investigates the cooperative control of the surface vehicles and validates the algorithm on that.”
The team tested groups of three Roboats connected either end on end or side by side, and showed that they were able to navigate to set destinations well in either configuration.
All of these advances will inform the full-size version of the Roboat, which shouldn’t be too far away – after all, the project is about to enter the final year of its planned five-year duration.
The research will be presented at the International Conference on Intelligent Robots and Systems. Check out Roboat II in action in the video below.
Source: MIT





