


Researchers have used a variety of technologies to give robots the ability to climb walls, such as magnets, rolling seals and electro-adhesive properties. But when it comes to wall-climbing robots its hard to go past the humble gecko for inspiration. The gecko's specialized toe pads containing hair-like structures that allow it to scale smooth vertical surfaces have already provided inspiration for the four-legged Stickybot and now researchers at Canada's Simon Fraser University Burnaby (SFU) claim to be the first to apply the gecko's wall-climbing technique to a robot that operates like a tank.
The researchers created adhesives that mimic the dry, but sticky toe pads of the gecko, also known as dry fibrillar adhesives, by using a material called polydimethylsiloxane (PDMS) that was manufactured to contain very small mushroom cap shapes that were 17 micrometers wide and 10 micrometers high.
"The thin, flexible overhang provided by the mushroom cap ensures that the area of contact between the robot and the surface is maximized," says Jeff Krahn. "The adhesive pads on geckos follow this same principle by utilizing a large number of fibers, each with a very small tip. The more fibers a gecko has in contact, the greater attachment force it has on a surface."

The researchers say applying the adhesive to tank-like robots driven by belts instead of legs offers several advantages. Tank-like robots have a simplified mechanical design and control architecture and also boast increased mobility and can be easily expanded if there is the need to increase the load a robot is carrying.
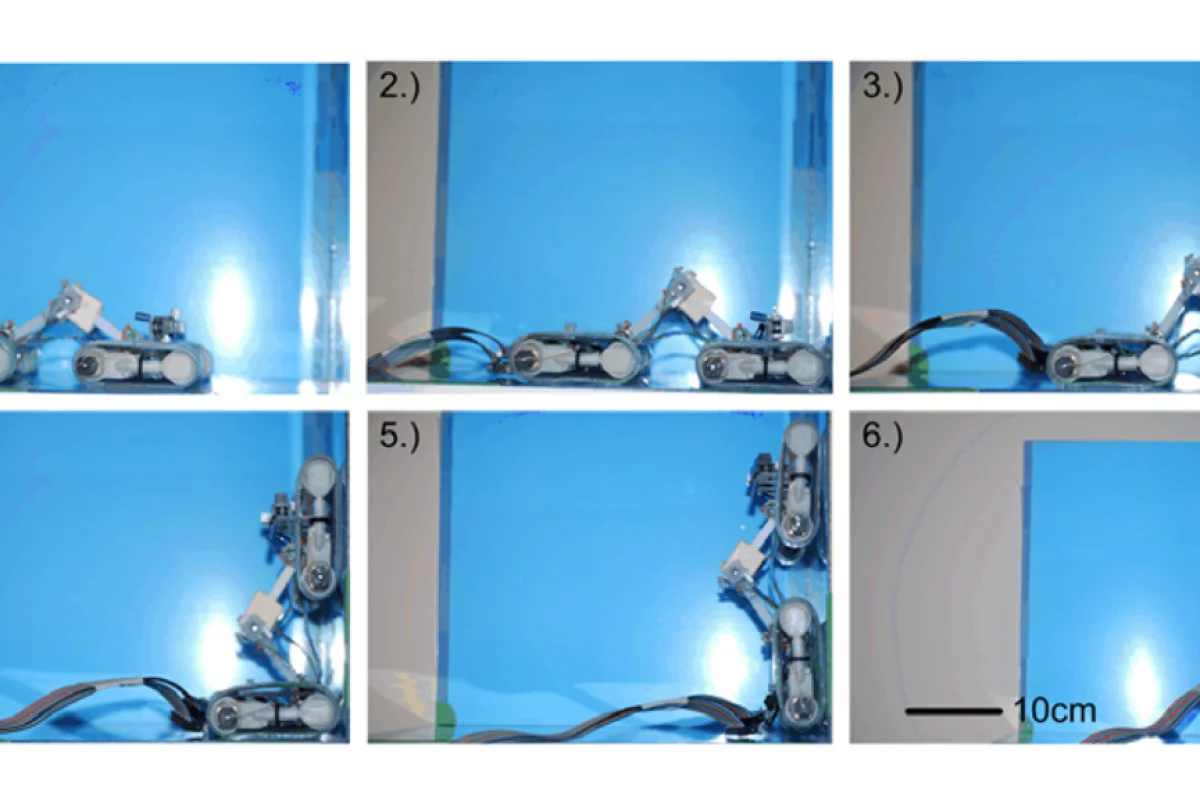
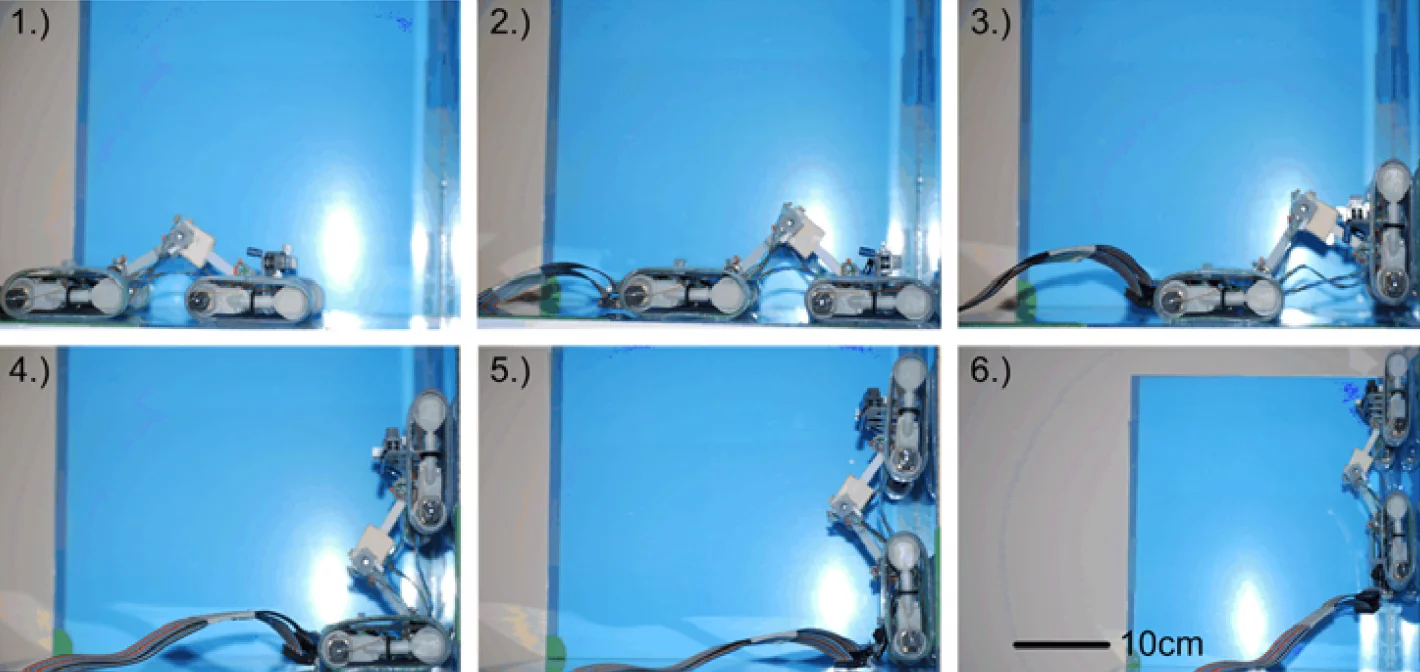
The 240 g (8.46 oz) robot developed by the SFU researchers, which has been given the catchy name of the Timeless Belt Climbing Platform (TBCP-II) has been fitted with a multitude of sensors that allow it to detect its surroundings and change its course accordingly. It is also able to transfer from a flat horizontal surface to a flat vertical surface over both inside and outside corners at speeds of up to 3.4 cm/s (1.34 in/s).
The SFU researchers say the wall-climbing technology employed in TBCP-II has wide-ranging potential applications, including inspecting pipes, buildings, aircraft and nuclear power plants, and in search and rescue operations.
The team's study A tailless timing belt climbing platform utilizing dry adhesives with mushroom caps was published today in the journal Smart Materials and Structures.
The video below shows the TBCP-II climbing a whiteboard and transitioning from a horizontal surface to a vertical surface around an outside corner.





