


Wyss Institute's forays into soft robots and robotics have borne more ripe fruit in the shape of a soft robotic arm fit for use on submarines to handle delicate marine life like coral, jellyfish and octopuses. This isn't the Harvard institute's first, but its latest iteration moves with "unprecedented dexterity."
We've reported on Wyss Institute's soft robotic arms as recently as August, but this new arm is controlled by a glove equipped with an array of soft sensors that can be worn by a scientist to control the robot arm. The operator merely needs to rotate and flex their wrist to move the arm accordingly, or bend their index finger to work the grippers.
The arm itself includes interchangeable parts that can bend, rotate and grip, so it can be tailored to best perform the task at hand, and open up new habitats to study. The arm is powered with the help of a hydraulic engine, which the researchers say is suitable for use in harsh and remote locations.
The arm has been developed in conjunction with the John A. Paulson School of Engineering and Applied Sciences at Harvard, Baruch College of the City University New York and the University of Rhode Island.
"This new soft robotic arm replaces the hard, rigid arms that come standard on most submersibles, enabling our soft robotic grippers to reach and interact with sea life with much greater ease across a variety of environments and allowing us to explore parts of the ocean that are currently understudied," Brennan Phillips, first author of the associated research, says in a press release.
The system uses less than half the power than even the smallest arms available today, which is a huge benefit considering that explorer submarines tend to be battery powered.
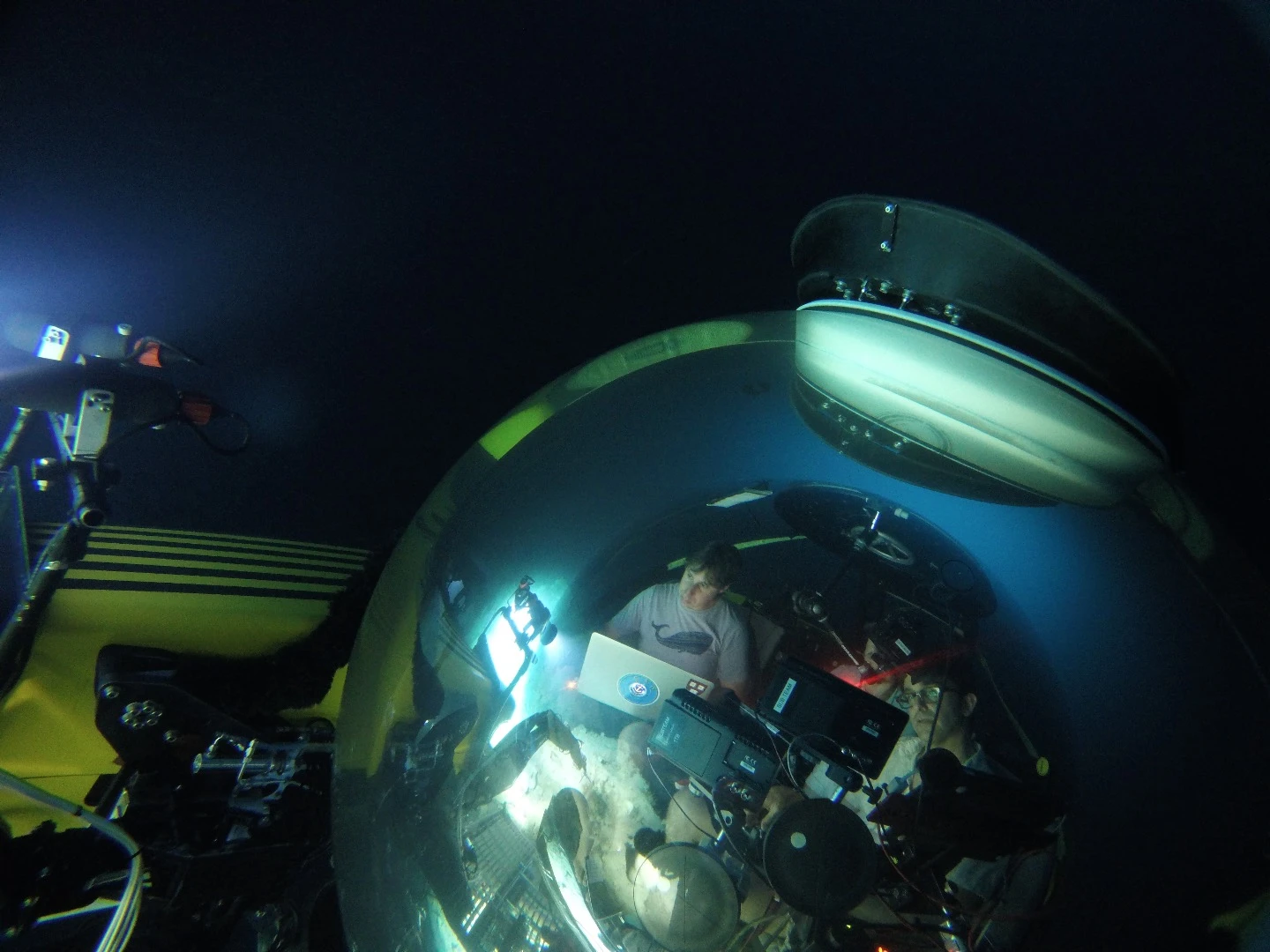
The technology has been put to the test aboard a three-person submarine in previously-unexplored ecosystems, deep in the ocean around the Fernando de Noronha Archipelago of Brazil. The researchers say they were able to interact with or collect a glass sponge, sea cucumber, branching coral and bioluminescent tunicate – a type of marine invertebrate.
Its developers speculate that the technology could one day lead to undersea laboratories where research can be done instead of having to bring samples onto dry land.
"This low-power, glove-controlled soft robot was designed with the future marine biologist in mind, who will be able to conduct science well beyond the limits of SCUBA and with a comparable or better means than a via a human diver," senior author Robert Wood says in the press release.
The team's research has been published in Scientific Reports. Work continues in order to add non-invasive DNA- and RNA-sampling units to the system to further reduce the need to bring live samples to the surface.
Wyss Institute is also working on soft wearable exoskeletons which we most recently reported on last month.
A video of this latest research, from Wyss Institute at Harvard University, can be seen below.
Source: Wyss Institute





