
The good news: The Loch Ness Monster has been captured on sonar by an underwater robot operated by the British division of Norway's Kongsberg Maritime. The bad news: "Nessie" is a prop from a Sherlock Holmes film that sank in the loch in 1969. The monstrous model was long thought lost until it was discovered this week by the Munin Autonomous Underwater Vehicle (AUV) as part of an underwater survey of the loch for The Loch Ness Project and VisitScotland.
There have been sporadic sightings of what is purported to be the Loch Ness Monster since the first recorded encounter by St Columba in 565 AD. After a supposed photograph was taken in 1933, public interest in some sort of large, dinosaur-like creature making its home in the Highlands skyrocketed, and in the decades since the loch has been subjected to sonar scans, submersible hunts, hydrophone surveys, and enough photographs taken above and below the surface to wallpaper the Grand Canyon.
However, despite all this effort, no conclusive evidence for the existence of Nessie, as it is nicknamed, has ever been found. And yet, surveys, such as the one that Kongsberg Maritime is conducting, continue to collect more data about the loch, its ecology, and whether it could support any sort of population of large, unknown aquatic or semi-aquatic life ranging for surviving plesiosaurs to giant eels.
This week's discovery may not rock the zoological world, but it is the answer to a 46-year old cinematic mystery.

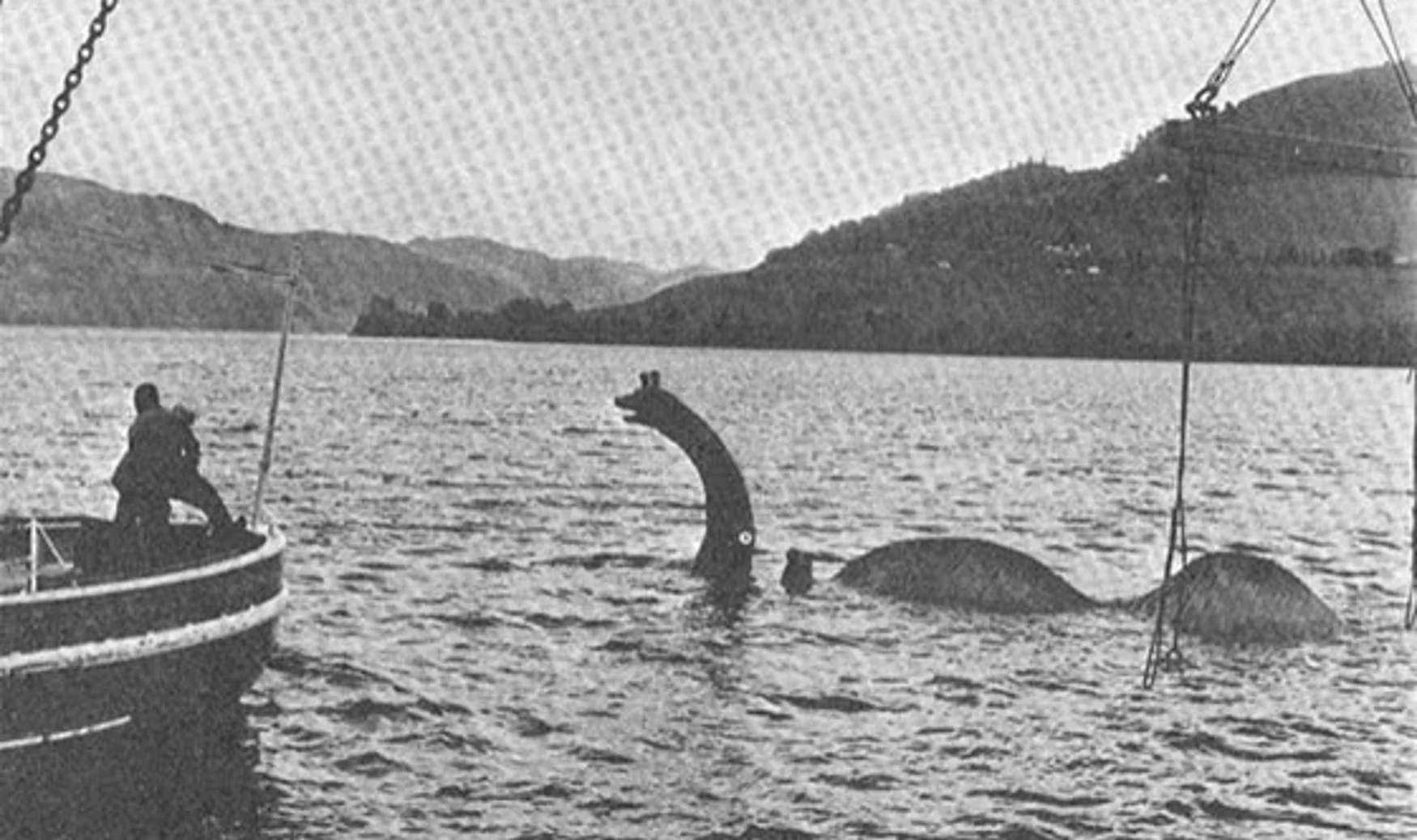
The "life-size" Nessie prop was built by special effects artist Wally Veevers for the feature film The Private Life of Sherlock Holmes, which was released by United Artists in 1970. It was directed by Billy Wilder and starred Robert Stephens, Colin Blakely, Geneviève Page, and Christopher Lee. The plot involves a bored Sherlock Holmes investigating the disappearance of a Belgian engineer, which leads him to Scotland and one scene includes Holmes and his companion Dr Watson being attacked on the waters of Loch Ness by the monster.
The 30-ft (9 m) long "monster" consisted of a head, neck, and two humps, which were supported by a floatation chamber and the whole apparatus was towed by the Vickers Pisces III two-man submersible, which was brought in for the filming. Unfortunately, Wilder didn't care for the humps and had them removed. This compromised the prop's buoyancy and when it was first towed out for film tests in 1969, it sank like a stone. The model was quickly replaced by a smaller glassfiber head and neck, which was confined to a studio tank.
Monster-hunting robot
One reason for the Munin robot going through its paces in Loch Ness is that it poses a considerable challenge to a surveyor. Loch Ness is the second largest lake in Britain and the second deepest, with some parts sounding to 226.96 m (744.6 ft). The fresh water doesn't provide much buoyancy and the silt-choked sides of the loch plunge very steeply like and underwater canyon, so sonar scans are very difficult.

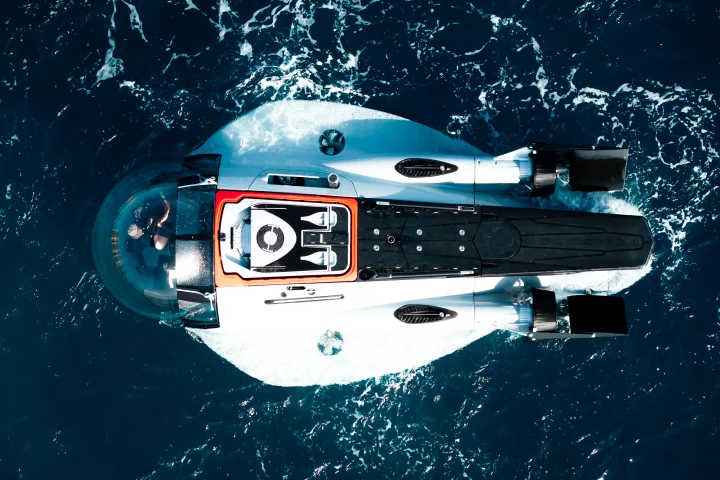
The Munin is a derivation of Kongsberg Maritime's previous Hugin and Remus underwater robots and is designed to operate at low cost and with little logistical support. Its torpedo-shaped body weighs under 300 kg (661 lb) and its modular design consists of compartments for cameras, sensors, batteries, variable payloads, and sonar transducers.
In what Kongsberg calls the first survey of its kind in Scotland, the Aberdeen-based Munin AUV is using cameras and multibeam and sidescan sonar capable of high resolution images at depths of up to 1,500 m (4,900 ft) to map the lake bottom. It can run for up to 24 hours while reaching speeds of up to 5.2 mph (8.3 km/h).
When not hunting for monsters, Munin is used for geophysical surveys, debris clearance, hydrography, search and recovery, and ecological assessment.
"Kongsberg Maritime Ltd began surveying Loch Ness with some of the world's first multibeam sonar back in 1987," says Craig Wallace, senior subsea applications engineer. "Over the years, the company has returned many times, bringing the latest technology to uncover the Loch's mysteries. We expect to uncover new information from the Loch during this survey, as Munin is the most advanced low-logistics AUV on the market and is the first of the next generation AUVs from Kongsberg Maritime. Merging the cutting edge technology from the commercial sector whilst maintaining the robust reliability from the military market, the vehicle is providing insight to the Loch's depths as never before imagined. Finding Nessie was, of course, an unexpected bonus."
The video below shows the sonar scan area.
Source: Kongsberg Maritime