
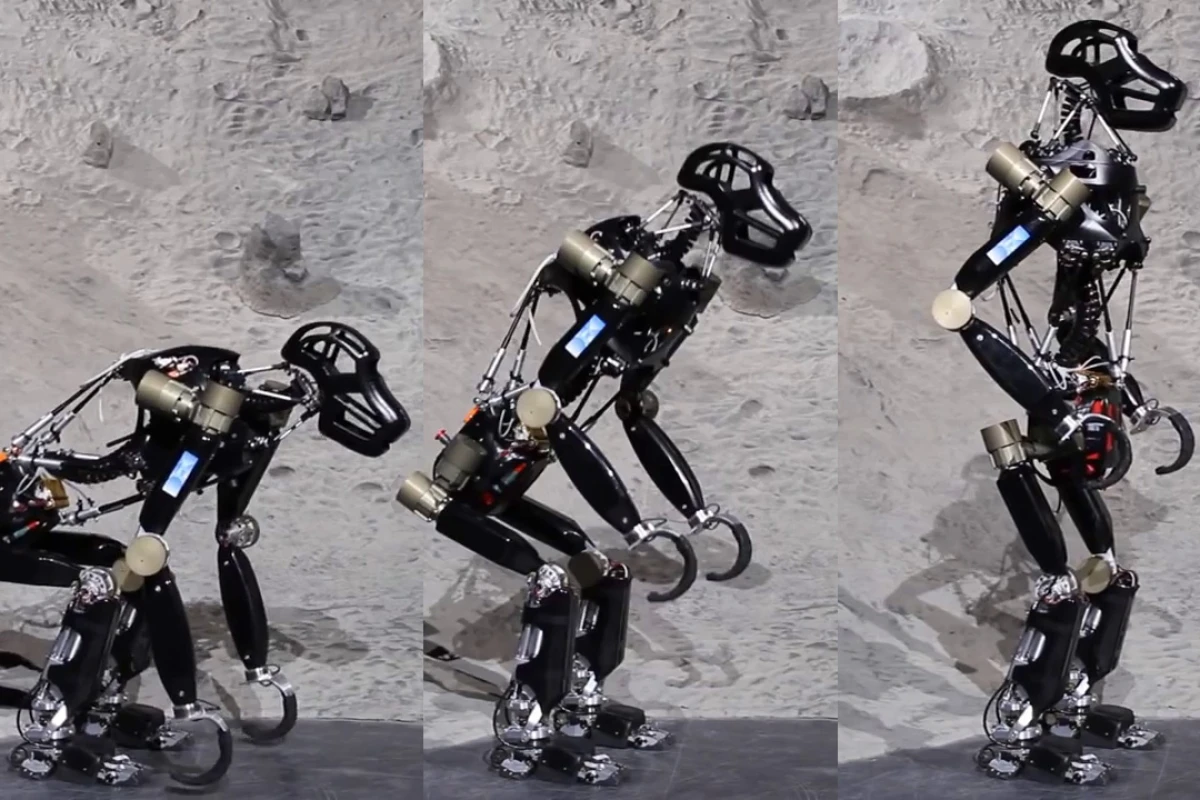

Back in June the world got its first glimpse of the iStruct, a robot ape developed at the German Research Center for Artificial Intelligence (DFKI) and the University of Bremen. We predicted that in addition to the stability afforded by walking on all fours, the robot ape could feasibly stand up to free its hands for other kinds of work. Now the team has published a video that shows how their robot accomplishes this maneuver with the help of its flexible spine and sensitive feet.
In email correspondences with Daniel Kühn, iStruct's primary researcher, he explained that while it's referred to as a "space robot" (and is being tested in a mock lunar landscape), his focus was designing biologically-inspired robotic structures.
Years earlier he had designed the LittleApe, a much smaller, light-weight ape robot that had a flexible spine and simple feet. "The LittleApe robot was able to walk and to climb a fence, but the passive spine was, or is, a limiting factor," Kühn explains. And its single-contact feet, while good for a prototype, needed to be improved. That's where the iStruct takes things to the next level.
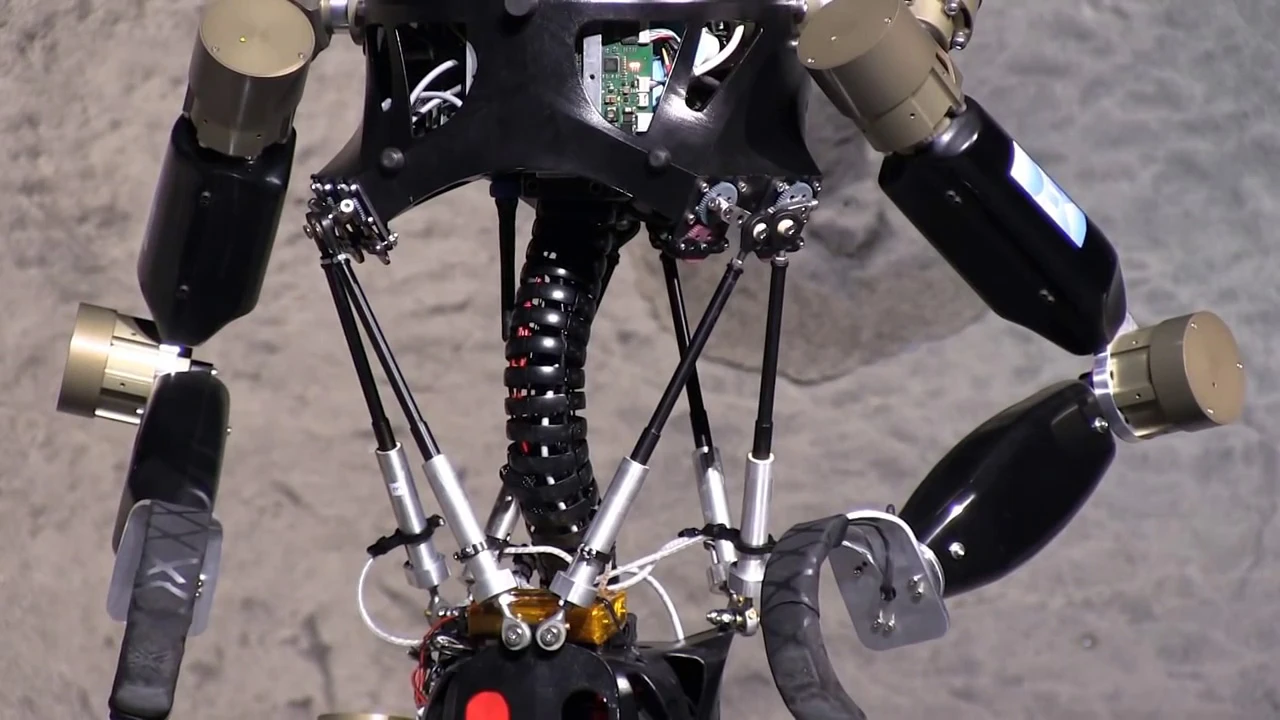
Currently, it may only stand and maintain its balance. However, its multi-contact feet could provide the necessary data to maintain the robot's balance as it transitions from a quadrupedal to bipedal gait. "There are only a few robots out there with an actuated spine that are actually moving and walking around," Kühn says. "We want to investigate whether it is beneficial for the locomotion or not – but we think it is. For example, in a two legged posture we have an increased arm range of motion, since the spine is active."
Recently, Boston Dynamics has proven than an actuated spine can help with locomotion; its WildCat quadruped is currently the fastest in the world, thanks in part to the flexing action of its spine. However, there are robots in development for the DARPA Robotics Challenge that will attempt to perform a similar move from four to two legs without a sophisticated spine. Both the DRC-HUBO, developed primarily in South Korea, and Carnegie Mellon University's CHIMP robot, are designed with the ability to move on all fours before transitioning to an upright posture for doing manual work.
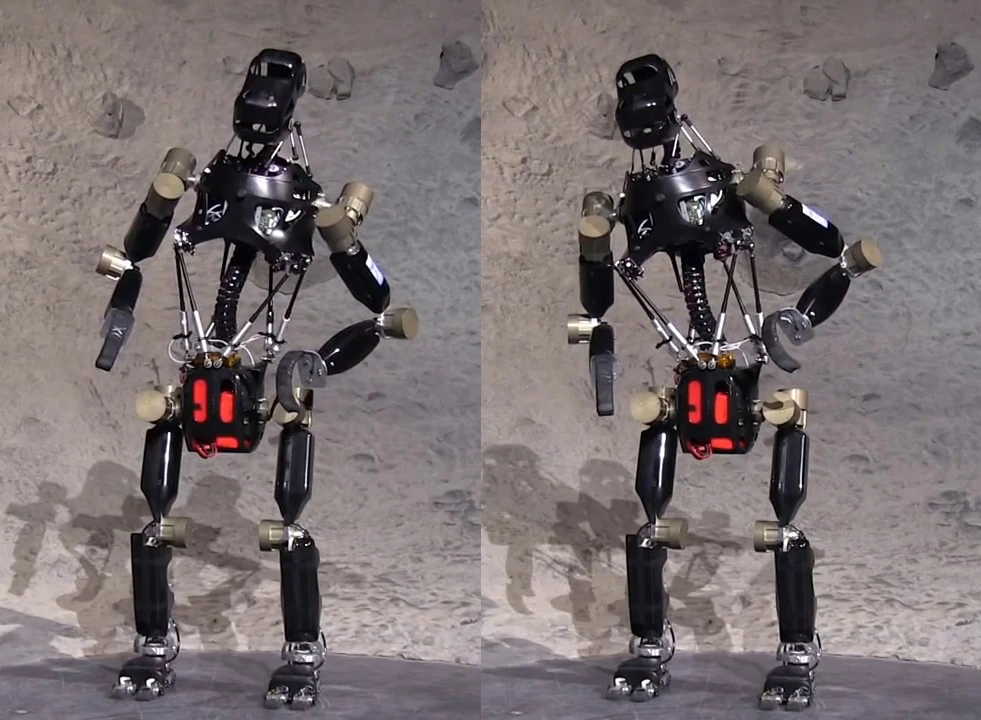
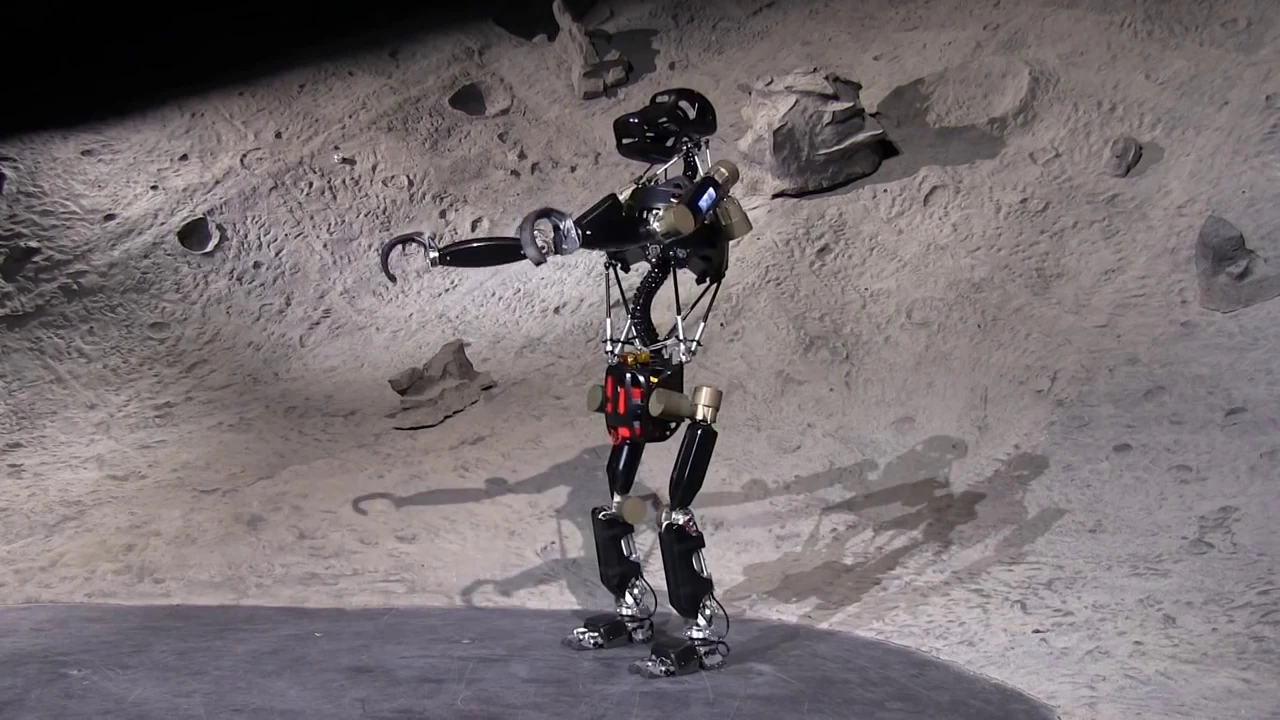
Despite its successes, the iStruct won't be exploring lunar craters any time soon. "We are far away from the Red Planet robot AMEE," Kühn admits, and the project is due to wrap soon. Still, you can see it stand upright and twist and turn using its spine in the following video, which is pretty impressive in its own right.
Source: DFKI via IEEE Spectrum





