
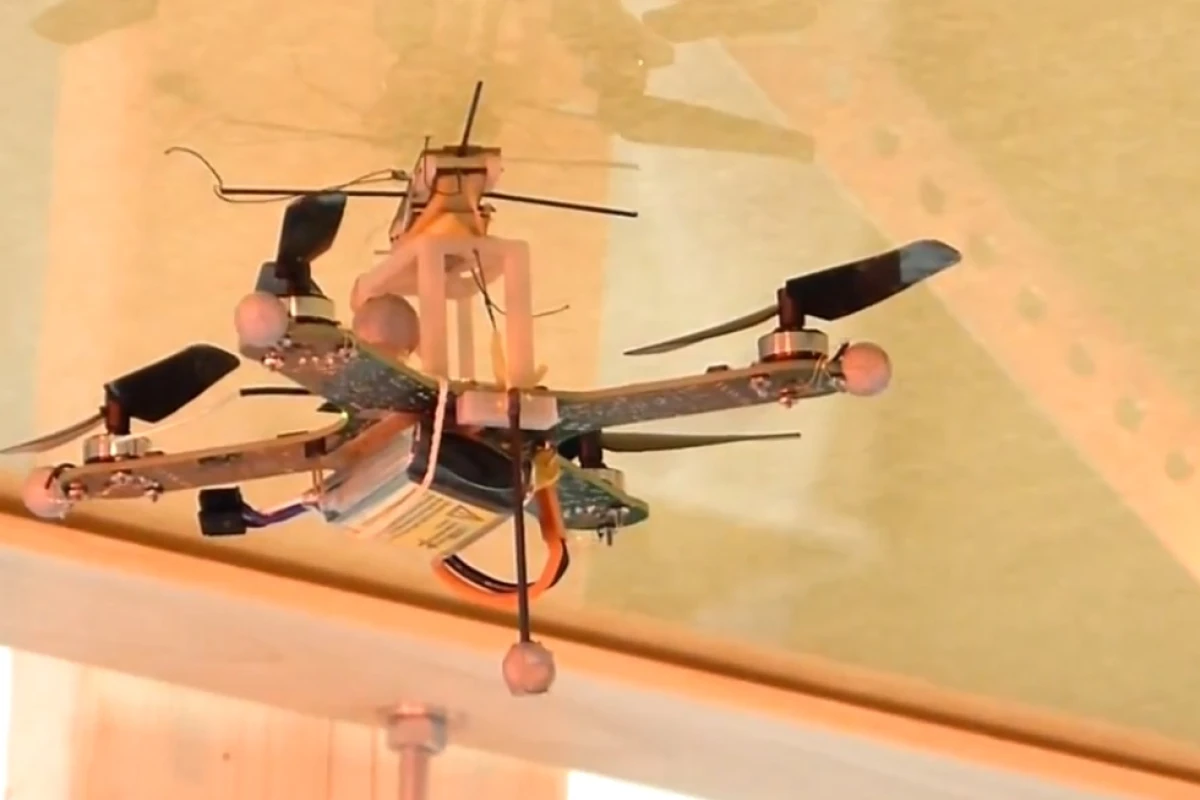
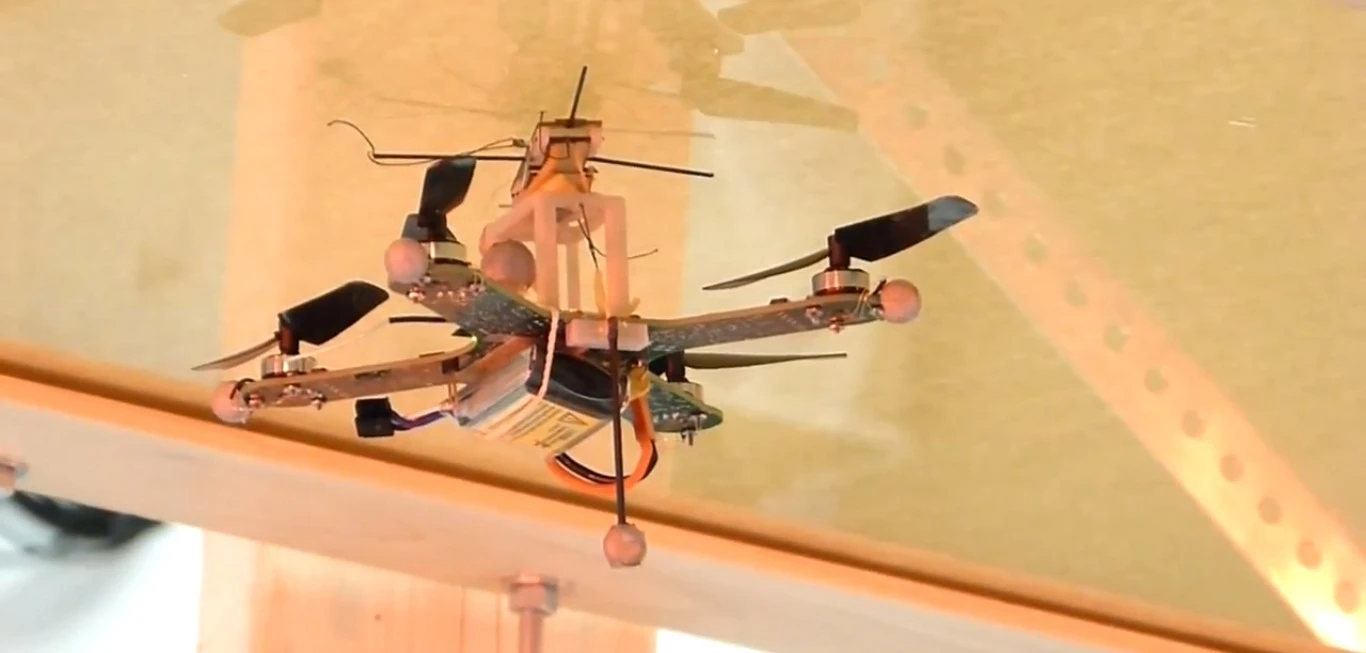
Micro UAVs that have the ability to slip into tight spaces, including inside buildings, have wide ranging military and search and rescue applications. To reach their full potential, however, these UAVs are going to need to learn how to land in rougher areas that don't always have a horizontal surface to touch down on. One team of scientists has begun taking a huge step towards accomplishing just that by developing a quadcopter with a mechanism that allows it to land on walls or ceilings, stay for a while, and then take off again.
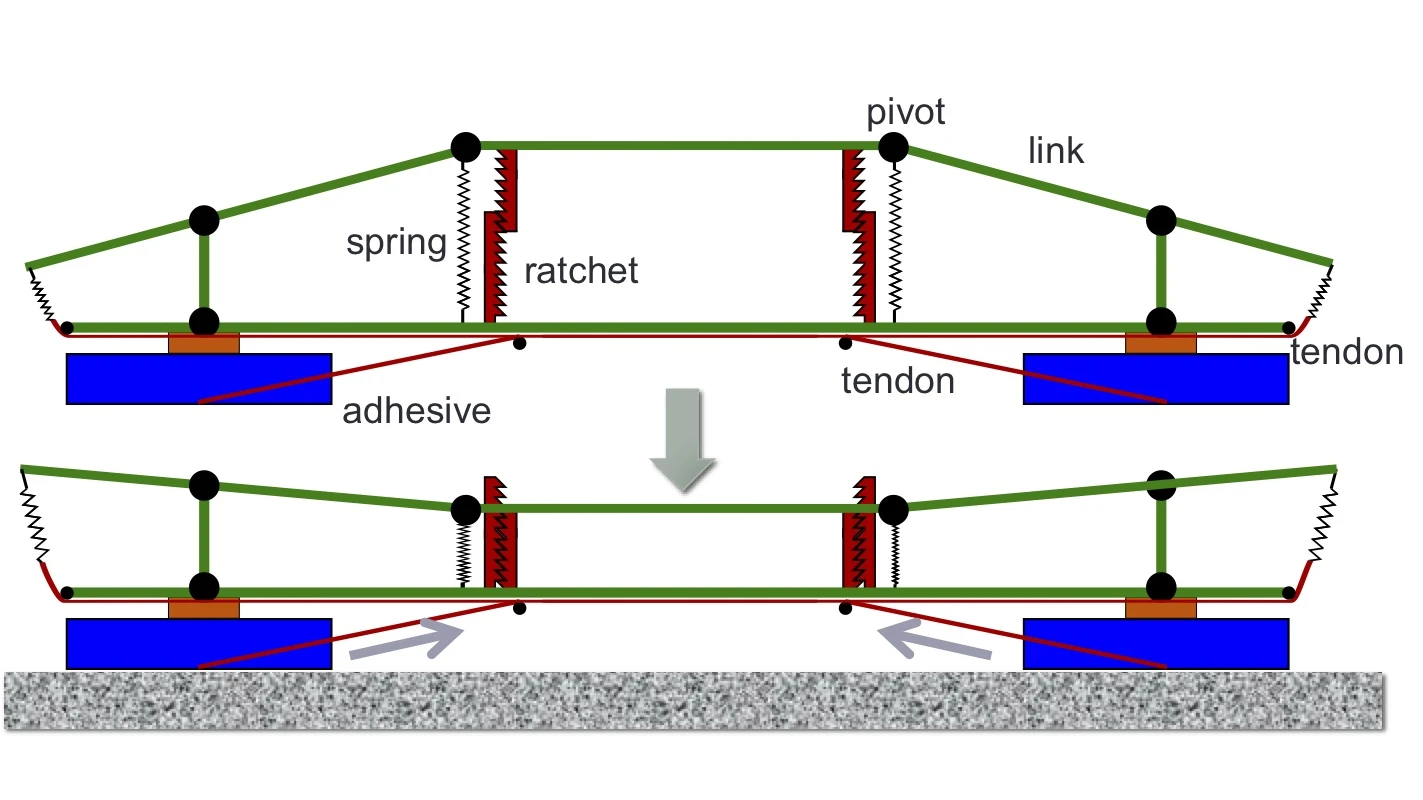
The landing mechanism makes use of the same dry adhesive used on the gecko-inspired Stickybot, combined with aligned tendons to allow the quadcopter to stick to most surfaces and remain in place. Once it hits a flat spot at any angle, the adhesives are deployed and the tendons tightened, creating enough surface friction to form a strong grip. The landing impact also compresses several springs and locks them down, so they can be triggered later to launch the aircraft away. As a bonus, this process doesn't deplete any extra power, since the quadcopter's own kinetic energy is used to both activate and release the landing mechanism.
It's hard not to picture a microphone-equipped UAV with this system flying into an open window and affixing itself underneath a desk, out of sight, but the ability to stick to walls and ceilings has applications other than spying. Landing on any surface would allow it to conserve power or take time to recharge an onboard battery, even when landing conditions aren't optimal. It would also be able to find better shelter from harsh weather or falling debris in a disaster zone.
The project is a joint effort between laboratories at Stanford, the University of Maryland, and MIT – all partly funded by the US Army Research Lab and the National Science Foundation. In fact, Stanford's Biomimetics and Dexterous Manipulation Lab had previously experimented with a similar perching mechanism for a fixed-wing aircraft as well as systems for the wall-climbing Stickybot, so this was a natural progression for the development team.
The video below only shows how a quadcopter can land on a smooth sheet of acrylic at an angle or upside down, but the team hopes to upgrade it to the point where it will attach to rough surfaces, fly away from a landing point, and even crawl along walls.
Source: Autonomous Vehicle Laboratory, Biomimetics and Dexterous Manipulation Lab via Popular Science





