

December 15 2004 Honda Motor has released details of its next-generation ASIMO robot that has now been under development for 19 years and is widely regarded as the most advanced humanoid robot in the world. The new version processes information far quicker than previous models and is hence more capable of responding to real-world environments. ASIMO incorporates three new major technologies, including "Posture Control" technology, making it possible for ASIMO to run in a natural, human-like way, "Autonomous Continuous Movement" technology, enabling ASIMO to choose a flexible route to a given destination and enhanced visual and force sensor technologies, enabling ASIMO to smoothly interact with people.
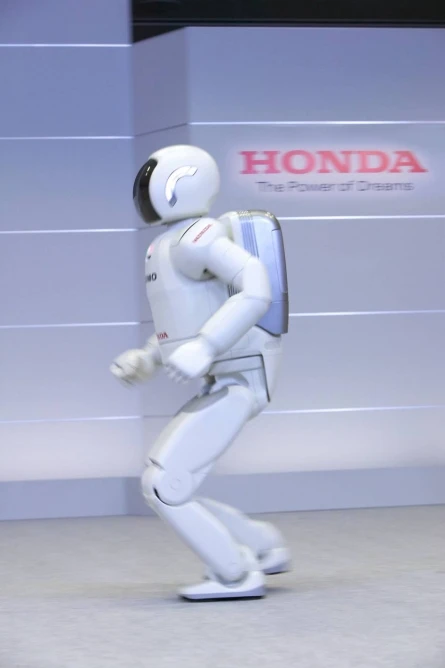
1. "Posture Control" technology, making it possible for ASIMO to run in a natural, human-like way.
The combination of newly developed high-response hardware and the new Posture Control technology enables ASIMO to proactively bend or twist its torso to maintain balance and prevent the problems of foot slippage and spinning in the air, which accompany movement at higher speeds. ASIMO is now capable of running at a speed of 3km/h and ASIMO's walking speed has been increased from 1.6 km/h to 2.5 km/h.
To enable ASIMO to run, two major obstacles had to be overcome. One was developing an accurate "leap" movement and the absorption of the landing impact. For a robot to run it has to be able to repeat the movements of pushing off the ground, swinging its legs forward, landing quickly and, without any delay, absorbing the instantaneous shock of landing. With a newly developed high-speed processing circuit, highly-responsive and high-power motor drive unit, in addition to a light-weight and highly rigid leg structure, Honda has developed hardware with performance levels more than four times faster than the previous generation ASIMO.
The second obstacle Honda overcame was slipping and spinning which accompany movement at higher speeds. Due to reduced pressure between the bottom of the feet and floor, spinning and slipping are more likely to happen right before the foot leaves the floor and right after the foot lands on the floor.
Combining Honda's independently developed theory of bipedal walking control with proactive bending and twisting of the torso, Honda developed a new control theory which enables stable running, while preventing slipping.
When a human runs, the step cycle is 0.2 to 0.4 seconds depending on speed, and the airborne time, when both feet are off the ground, varies between 0.05 to 0.1 seconds. The step cycle of ASIMO is 0.36 seconds with an airborne time of 0.05 seconds, which are equivalent to that of a person jogging.
2. "Autonomous Continuous Movement" technology, enabling ASIMO to choose a flexible route to a given destination.
The next-generation ASIMO has a floor surface sensor and visual sensors located in its head that allows ASIMO to autonomously detect and maneuver around obstacles without stopping. The new technology compares deviations between the input map information and information about the surrounding area, allowing ASIMO to independently change its path. 3. Enhanced visual and force sensor technologies, enabling ASIMO to smoothly interact with people.
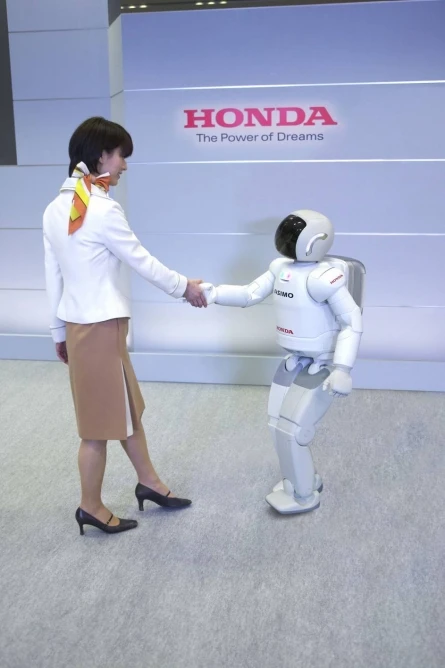
By detecting people's movements through visual sensors in its head and force (kinesthetic) sensors which have been newly added to its wrists, ASIMO can now move in sync with people. This allows ASIMO to give or receive an object, shake hands in concert with a person's movement and step forward or backward in response to the direction its hand is pulled or pushed.
By continuing to advance these new technologies, Honda will pursue development of an ASIMO that will be useful to people. 4. Specifications - Next-generation ASIMO
Running speed - 3 km/h (airborne time: 0.05 seconds)
Normal walking speed - 2.5 km/h
Height - 130 cm
Weight - 54 kg
Continuous operating time - 1 hour
Operating degrees of freedom - 34 degrees of freedom, total
There are many other innovations incorporated into this next-generation ASIMO, such as:
Hip rotational joint - increased walking speed was achieved by the proactive rotation of the hips in addition to swinging of the arms, which balance the reaction force generated when the legs swing forward during running or walking.
Wrist bending joint - the movement of the wrist area is more flexible due to two additional axes in each wrist.
Thumb joint - previously, one motor operated all five fingers. With addition of a motor that operates the thumb independently, ASIMO can now hold objects of various shapes.
Neck joint - with an additional axis added to its neck joint, ASIMO's movements are more expressive.





