
When it comes to building robots, why start from scratch when nature has already designed better materials and parts than our artificial ones? Japanese researchers have now developed a new way to integrate living muscle tissue onto a robotic skeleton, and make it move in a realistic way that takes some of the strain off.
This isn't the first time scientists have blended robots and living cells. In 2016, researchers used rat heart cells attached to a gold skeleton to make a squishy stingray "biorobot" that could be steered by light. Not long after, another team made a crawling robot out of sea slug muscles.
For the new creation, researchers at the University of Tokyo grew living muscles over the top of a robotic skeleton. They started with hydrogel sheets containing myoblasts, or muscle precursor cells. These were attached to anchor points on the skeleton, and shaped so the muscles would grow like fibers.
Electrodes were placed to stimulate the muscles into contracting, which allowed the robot to move, bending at a joint like a finger. In previous studies, artificial muscles began to wear out and shrink before too long, but the Tokyo researchers got around that by arranging them in natural "opposition," where two muscles work together to achieve the same goal in different ways. While one is contracting and pulling a limb, for example, another is expanding and pushing it in the same direction.
"Once we had built the muscles, we successfully used them as antagonistic pairs in the robot, with one contracting and the other expanding, just like in the body," says Shoji Takeuchi, corresponding author of the study. "The fact that they were exerting opposing forces on each other stopped them shrinking and deteriorating, like in previous studies."
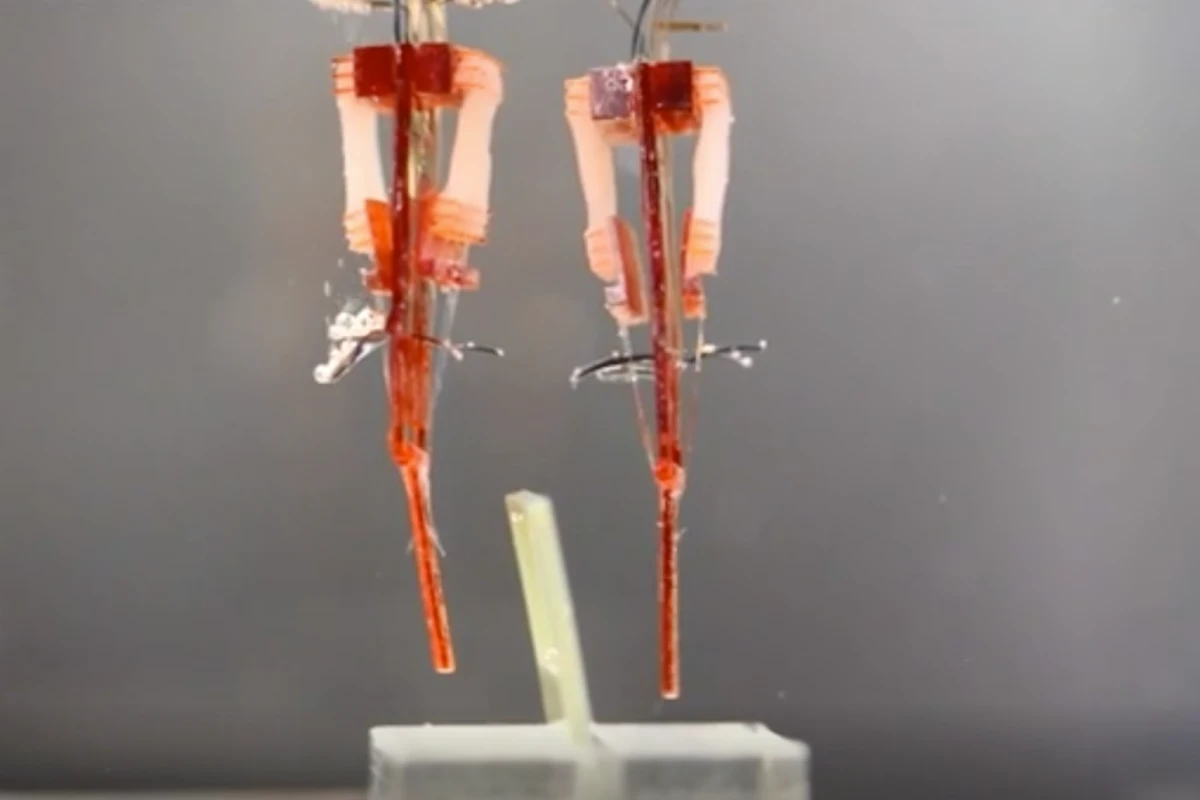
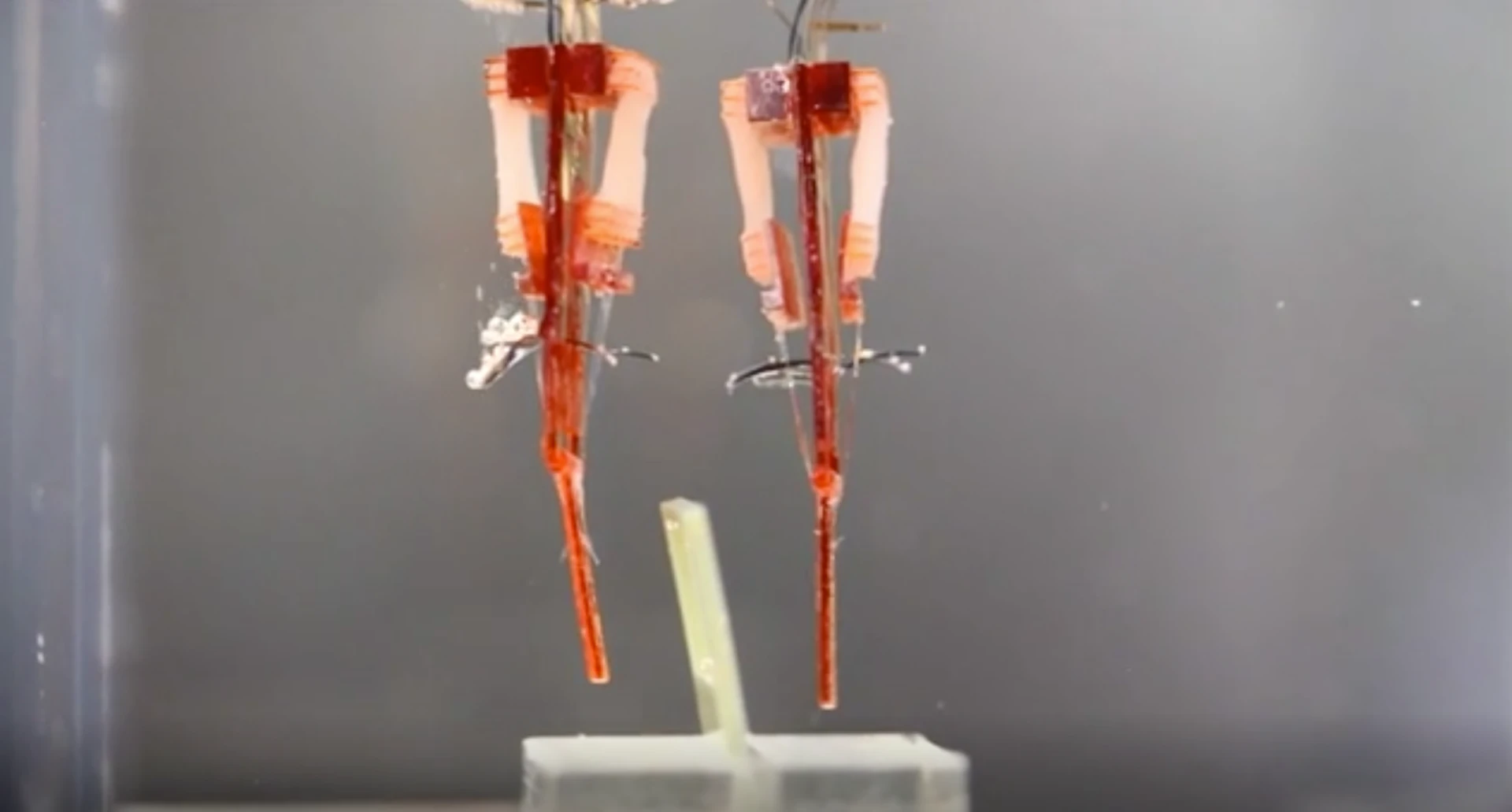
To test the design, the researchers made a kind of robot finger that could flex up to 90 degrees when electrically activated. One of these robots alone was able to pick up and move a ring, while two together could pick up a square frame. Because of the antagonistic design, the muscles could function for over a week without deterioration.
"Our findings show that, using this antagonistic arrangement of muscles, these robots can mimic the actions of a human finger," says Yuya Morimoto, lead author of the study. "If we can combine more of these muscles into a single device, we should be able to reproduce the complex muscular interplay that allow hands, arms, and other parts of the body to function."
The research was published in the journal Science Robotics, and the robots can be seen in action in the video below.
Source: University of Tokyo





