
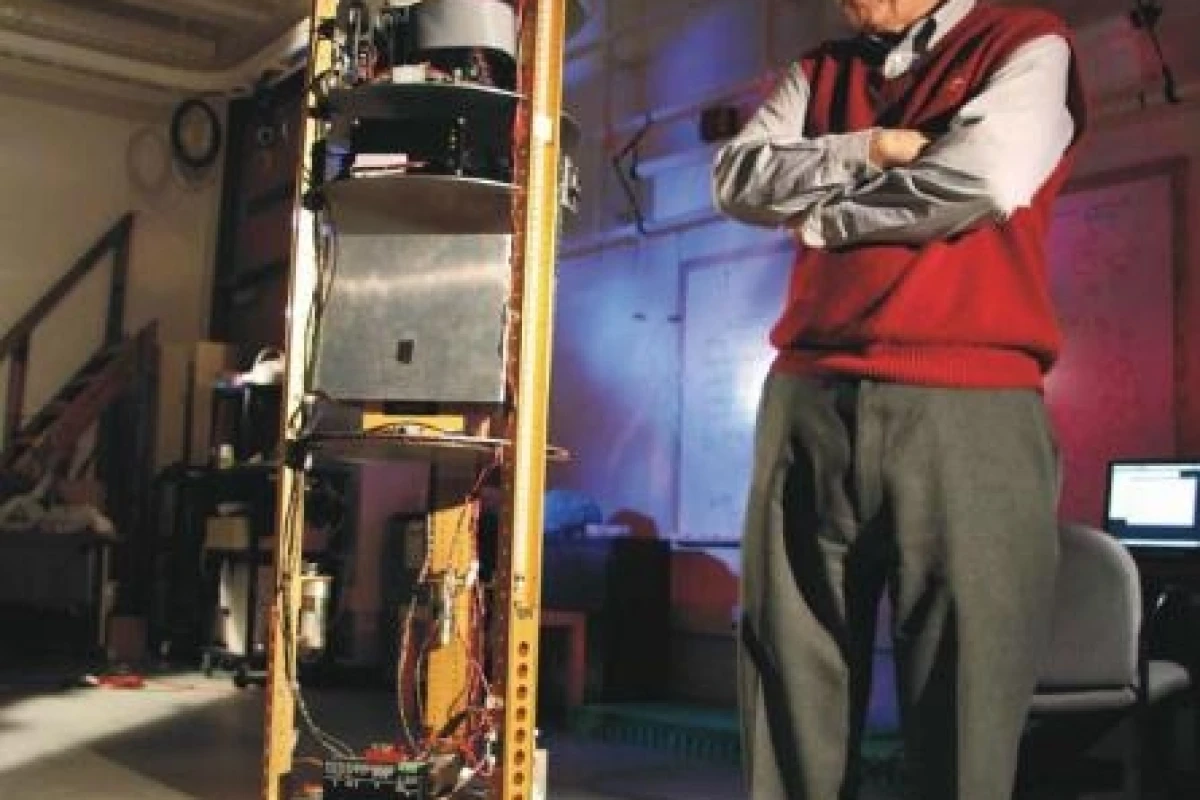
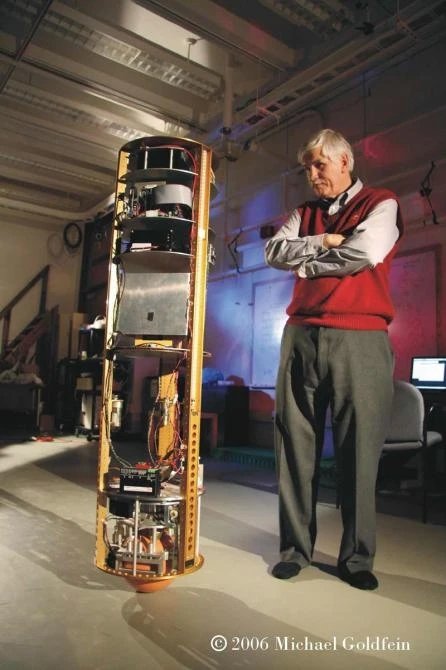
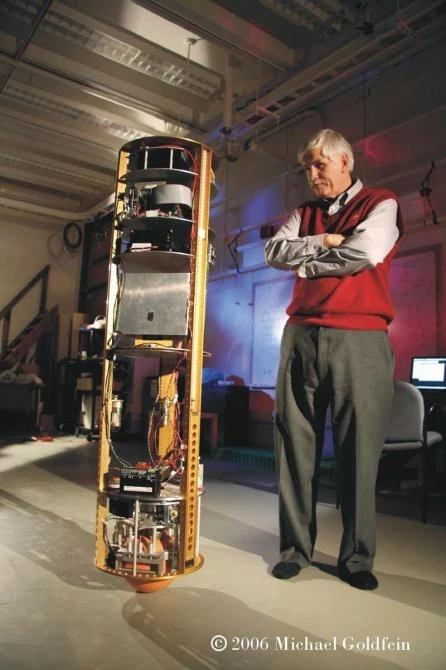
August 13, 2006 Contrasting with the bipedal humanoid robot portrayed in science fiction, Carnegie Mellon University researchers have developed a new type of mobile robot that balances on a ball. “Ballbot” is a self-contained, battery-operated, omnidirectional robot that balances dynamically on a single urethane-coated metal sphere. It weighs 95 pounds and is the approximate height and width of a person. Because of its long, thin shape and ability to maneuver in tight spaces, it has the potential to function better than current robots can in environments with people.
Ballbot’s creator, Robotics Research Professor Ralph Hollis, says the robot represents a new paradigm in mobile robotics. What began as a concept in his home workshop has been funded for the last two years with grants from the National Science Foundation.
Hollis is working to prove that dynamically stable robots like Ballbot can outperform their static counterparts. Traditional, statically stable mobile robots have three or more wheels for support, but their bases are generally too wide to move easily among people and furniture. They can also tip over if they move too fast or operate on a slope.
“We wanted to create a robot that can maneuver easily and is tall enough to look you in the eye,” Hollis said. “Ballbot is tall and skinny, with a much higher center of gravity than traditional wheeled robots. Because it is omnidirectional, it can move easily in any direction without having to turn first.”
Ballbot has an onboard computer that reads balance information from its internal sensors, activating rollers that mobilize the ball on which it moves — a system that is essentially an inverse mouse-ball drive. When Ballbot is not in operation, it stands in place on three retractable legs.
Hollis noted that current legged robots, such as humanoids, are complex and expensive. He’s looking for simple alternatives to better understand the issues of dynamic stability for mobile robots in human environments. He believes that the research may produce a robot that could have useful, meaningful interactions with people who are elderly, disabled or need assistance in an office environment.
Hollis and his team — including Robotics Institute Project Scientist George Kantor and graduate students Tom Lauwers, Anish Mampetta and Eric Schearer — have demonstrated Ballbot moving on carpeted surfaces. They presented their research findings in October 2005 at the prestigious International Symposium for Robotics Research in San Francisco, and most recently at the International Conference on Robotics and Automation, which took place in mid-May in Orlando, Fla. Future plans for Ballbot include adding a head and a pair of arms. Swinging the arms, said Hollis, would help to rotate and balance the body.
“We want to make Ballbot much faster, more dynamic and graceful,” he said. “But there are many hurdles to overcome, like responding to unplanned contact with its surroundings, planning motion in cluttered spaces and safety issues.”
Hollis has been a pioneer in the field of mobile robots since he began building them as a hobby in the 1950s — well before there were commodity transistors, personal computers or easily accessible off-the-shelf parts. In the 1960s, he developed one of the world’s first mobile robots and followed that in the 1970s with the Newt mobile robot, which was one of the first to have an onboard computer. Hollis wrote an article about Newt for the now-defunct Byte Magazine that was voted one of the publication’s best stories of all time. Newt subsequently became a subject in the NOVA television documentary “The Mind Machines.”
Hollis’ hobby ultimately became his career. He earned bachelor’s and master’s degrees in physics from Kansas State University and a doctorate in the field from the University of Colorado. After a short time at North American Aviation, where he worked on computer simulations of space-flight vehicles, he joined the staff at IBM’s Thomas J. Watson Research Center in 1978. He initially focused on magnetism and acoustics, but jumped at the opportunity to enter their fledgling robotics research program. He served as manager of advanced robotics in IBM’s Manufacturing Research Department from 1986 to 1993, when he accepted a position as a senior research scientist at Carnegie Mellon’s Robotics Institute.
“When I started building robots, the field didn’t even exist,” said Hollis. “Now the field has grown up around me and I’m in the middle of it. It’s like a dream come true.”





